
25 câu hỏi
Hàm truyền của hiệu chỉnh tích phân tỉ lệ PI(proportional integral) liên tục có dạng:
Tần số cắt biên:
Là tần số tại đó biên độ của đặc tính tần số bằng 1(hay bằng 0dB)
Là tần số tại đó pha của đặc tính tần số bằng -π (hay -1800 )
Là tần số tại đó có độ dự trữ biên
Là tần số tại đó có đỉnh cộng hưởng
Đơn vị dB/dec có nghĩa là:
decibel/decimal
decibel/decade
decibel/decimet
decibel
Cho hệ có phương trình đặc trưng:
Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
Hệ thống không ổn định, có 3 nghiệm có phần thực dương
Hệ thống không ổn định, có 2 nghiệm có phần thực dương
Hệ thống không ổn định, có 1 nghiệm có phần thực dương
Hệ thống liên tục ổn định nếu tất cả các nghiệm của phương trình đặc tính:
Nằm bên phải mặt phẳng phức
Nằm trên trục ảo
Nằm bên trái mặt phẳng phức
Nằm trên trục thực
Hàm truyền của hệ thống ở hình trên là:
Khâu hiệu chỉnh PI (Proportional Integral ) có đặc điểm là:
Làm chậm đáp ứng quá độ, tăng độ vọt lố, giảm sai số xác lập
Làm chậm đáp ứng quá độ, giảm độ vọt lố, giảm sai số xác lập
Làm tăng đáp ứng quá độ, tăng độ vọt lố, tăng sai số xác lập
Làm tăng đáp ứng quá độ, giảm độ vọt lố, giảm sai số xác lập
Hệ thống có quỹ đạo nghiệm số như hình vẽ:
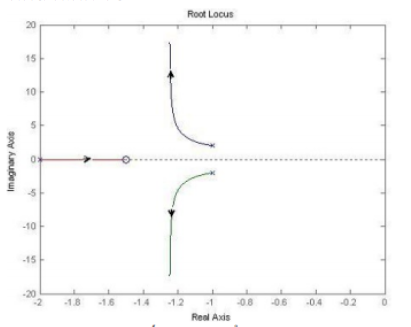
Hệ thống không ổn định
Hệ thống có 2 nghiệm cực và 1 zero
Hệ thống có 3 nghiệm cực
Hệ thống có 3 nghiệm cực và 1 zero
Hệ phương trình trạng thái được mô tả dưới dạng ma trận, với:
C là ma trân {1 x n}
C là ma trận {n x 1}
C là ma trận {n x n}
C là ma trận {n x m}, với n khác m
Bộ chuyển đổi D/A:
Chuyển đổi tín hiệu tương tự sang tín hiệu số
Chuyển đổi tín hiệu số sang tín hiệu tương tự
Tương tự như khâu lấy mẫu dữ liệu
Sử dụng trong điều khiển robot
Hệ thống có quỹ đạo nghiệm số như hình vẽ:
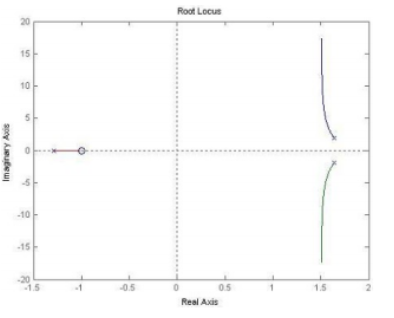
Hệ thống ổn định
Hệ thống không ổn định
Hệ thống nằm ở biên giới ổn định
Hệ thống có 4 nghiệm cực
Định nghĩa độ dự trữ ổn định:
Khoảng cách từ trục thực đến nghiệm cực gần nhất (nghiệm thực hoặc phức) được gọi là độ dự trữ ổn định của hệ
Khoảng cách từ trục ảo đến nghiệm cực gần nhất (nghiệm thực hoặc phức) được gọi là độ dự trữ ổn định của hệ
Khoảng cách từ trục hoành (ox) đến nghiệm gần nhất (chỉ nghiệm thực) được gọi là độ dự trữ ổn định của hệ
Khoảng cách từ trục tung (Oy) đến nghiệm cực gần nhất (chỉ nghiệm phức) được gọi là độ dự trữ ổn định của hệ
Một trong những qui tắc của quĩ đạo nghiệm số:
Số nhánh của quĩ đạo nghiệm số bằng bậc của phương trình đặc tính
Số nhánh của quĩ đạo nghiệm số bằng số zero của G0(s)
Số nhánh của quĩ đạo nghiệm số bằng số điểm tách nhập của quĩ đạo nghiệm
Số nhánh của quĩ đạo nghiệm số bằng hệ số khuếch đại
Khâu vi phân lý tưởng có hàm truyền G(s) = s:
M(ω)= ω ; φ(ω)=90o
M(ω)= 20lg(ω) ; φ(ω)= -90o
M(ω)= 1/ω ; φ(ω)=90o
M(ω)= -20lg(ω) ; φ(ω)= 90o
Biểu đồ Bode được vẽ trong hệ tọa độ vuông góc, trong đó:
Trục hoành được chia tuyến tính
Trục hoành được chia theo thang logarith
Gồm nhiều nhánh xuất phát từ các cực và tiến đến các zêro hoặc tiến đến vô cùng theo các đường tiệm cận
n đọan thẳng
Cho hệ có phương trình đặc trưng
Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phức
Hệ thống ổn định, không có nghiệm có phần thực dương
Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
Chu kỳ lấy mẫu T là:
Khoảng thời gian giữa 2 lần lấy mẫu
Khoảng thời gian giữa 2 lần lấy mẫu liên tiếp
Khoảng thời gian lấy mẫu
Khoảng thời gian ngắn nhất mà tín hiệu lặp lại trạng thái ban đầu
Bộ bù trễ pha được sử dụng khi:
Muốn giảm sai số xác lập của hệ thống
Muốn tăng sai số xác lập của hệ thống
Muốn tăng thời gian đáp ứng quá độ của hệ thống
Tín hiệu vào của hệ thống là hàm nấc đơn vị
Theo định lý Shanon để có thể phục hồi dữ liệu sau khi lấy mẫu mà không bị méo dạng thì:
f=2fc
f ≥ 2fc
Tần số lấy mẫu được chọn tuỳ ý
f ≤ 2fc
Quan hệ giữa tín hiệu vào và tín hiệu ra của hệ thống điều khiển rời rạc được mô tả bằng:
Phương trình vi phân
Phương trình sai phân
Phương trình đại số
Graph tín hiệu
Điều khiển là quá trình:
Thu thập thông tin
Tác động lên hệ thống để đáp ứng của hệ thống như mong muốn
Thu thập thông tin, xử lý thông tin và tác động lên hệ thống để đáp ứng của hệ thống gần với mong muốn
Thu thập và xử lý thông tin
Quỹ đạo nghiệm số của hệ rời rạc:
Không đối xứng
Đối xứng qua trục thực
Đối xứng qua trục ảo
Đối xứng qua góc tọa độ
Tín hiệu vào của bộ chuyển đổi D/A:
Tín hiệu liên tục
Tín hiệu số
Sóng sin
Xung vuông
Hệ thống hồi tiếp âm đơn vị; có hàm truyền vòng hở:
QĐNS có 3 nhánh
QĐNS có 3 nhánh tiến đến vô cùng và 1 nhánh tiến đến zero
QĐNS có 5 nhánh
QĐNS có 1 nhánh tiến đến zero và 2 nhánh tiến đến vô cùng
Quĩ đạo nghiệm số là:
Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ -∞ →0
Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ 0 →+∞
Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ -∞ →+∞
Tập hợp các zero của hệ thống