
25 câu hỏi
G(jω)=P(ω)+jQ(ω)=M(ω)ejφ(ω), trong đó:
M(ω) là đáp ứng pha, φ(ω) là đáp ứng biên độ
M(ω) là độ lợi, ω là tần số cắt
M(ω) là đáp ứng biên độ, φ(ω) là đáp ứng pha
P(ω) là pha của hệ thống
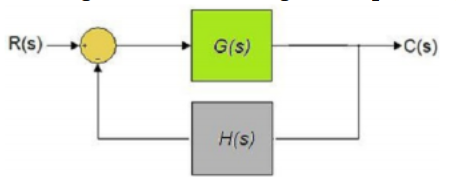
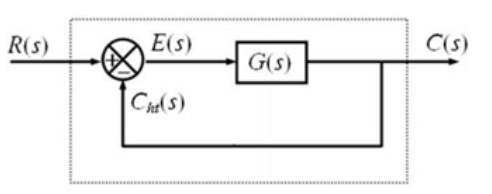
Hàm truyền vòng kín của hệ thống hồi tiếp dương là:
Cho hệ có phương trình đặc trưng. Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm có phần thực dương:
Hệ thống không ổn định, có 2 nghiệm có phần thực dương
Hệ thống không ổn định, có 3 nghiệm có phần thực dương
Hệ thống không ổn định, có 1 nghiệm có phần thực dương
Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
Biến đổi Laplace của hàm nấc đơn vị (step) f(t)=1(t):
s2
1/s
a
s
Cho hệ có phương trình đặc trưng s3+(K+2)s2+2Ks+10=0 . Hãy xác định K để hệ thống ổn định:
K >-2
K >0
K >1,45
K >2
Cho phương trình 2s4+s3+3s2+5s+10=0 .Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm có phần thực dương:
Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 3 nghiệm bên trái mặt phẳng phức
Sơ đồ khối hệ thống điều khiển vòng kín gồm có các phần tử cơ bản sau:
Tín hiệu vào, tín hiệu ra
Các khối hàm truyền đạt mắc nối tiếp
Thiết bị điều khiển, các bộ điều khiển , vòng hồi tiếp
Các khối hàm truyền đạt mắc song song
Điều kiện cần để hệ thống liên tục ổn định theo tiêu chuẩn ổn định đại số là:
Tất cả các hệ số của phương trình đặc trưng phải khác không và cùng dấu
Tất cả các hệ số của phương trình đặc trưng phải khác không
Tất cả các hệ số của phương trình đặc trưng phải cùng dấu
Tất cả các hệ số của phương trình đặc trưng phải dương
Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau:
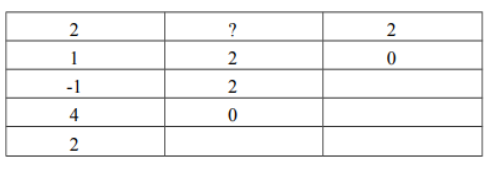
Phần tử “?” có giá trị bằng:
2
3
4
5
Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau:
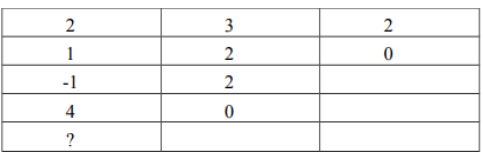
Phần tử “?” có giá trị bằng:
2
3
4
5
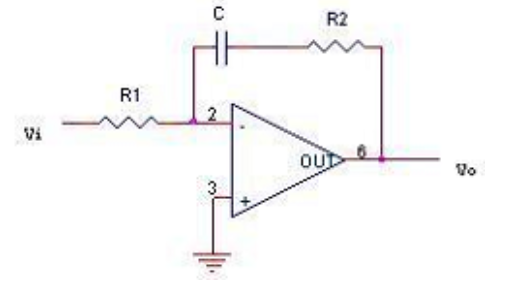
Hàm truyền đạt của mạch điện ở hình sau là:
Cho hàm truyền hãy lập phương trình trạng thái:
Đặc tính tần số của hệ thống là:
Tỉ số giữa tín hiệu vào xác lập và tín hiệu ra hình sin
Là tỉ số giữa tín hiệu vào hình sin và tín hiệu ra xác lập
Là tỉ số giữa tín hiệu ra hình sin và tín hiệu vào xác lập
Tỉ số giữa tín hiệu ra ở trạng thái xác lập và tín hiệu vào hình sin
Cho hàm truyền ,hãy lập phương trình trạng thái:
Hàm truyền của hiệu chỉnh vi phân tỉ lệ PD (proportional derivative) liên tục có dạng:
Hệ thống rời rạc bậc n được mô tả bằng:
Phương trình vi phân bậc n
Phương trình sai phân bậc n
(n+1) biến trạng thái
(n-1) biến trạng thái
Hệ MIMO là hệ thống có:
Nhiều ngõ vào- nhiều ngõ ra
Nhiều ngõ vào - một ngõ ra
Một ngõ vào – một ngõ ra
Một ngõ vào – nhiều ngõ ra
Cho hệ thống hở có đặc tính tần số như hình vẽ . Xét tính ổn định của hệ thống:
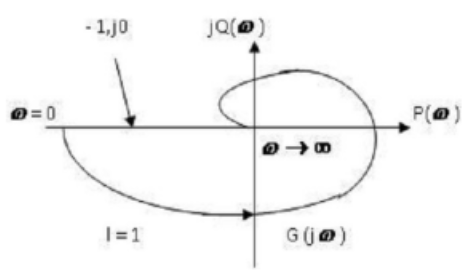
Hệ thống ở biên giới ổn định
Hệ thống không ổn định
Hệ thống ổn định
Đường cong Nyquist bao điểm (1,j0) 2 vòng theo chiều dương
Hàm truyền của hệ thống ở hình trên là:
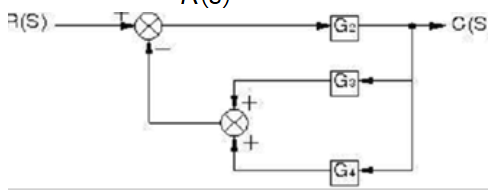
Hàm truyền vòng kín của hệ thống hồi tiếp âm đơn vị là:
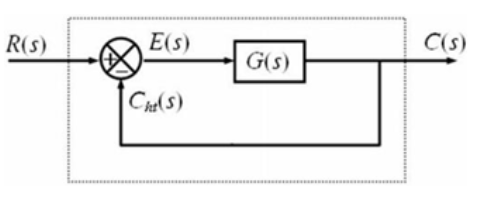
Hàm truyền vòng kín của hệ thống hồi tiếp dương đơn vị là:
Cho phương trình . Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm có phần thực dương:
Hệ thống ổn định, không có nghiệm có phần thực dương
Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phức
Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
Hàm truyền của hiệu chỉnh tỉ lệ P (proportional) liên tục có dạng:
Hệ phương trình trạng thái được mô tả dưới dạng ma trận, với:
A là ma trân {1 x n}
A là ma trận {n x 1}
A là ma trận vuông {n x n}
A là ma trận {n x m}, với n khác m
Các trạng thái cân bằng gồm:
Biên giới ổn định, ổn định
Ổn định, không ổn định
Biên giới ổn định, ổn định, không ổn định
Biên giới ổn định, không ổn định