
25 câu hỏi
Trong cơ cấu phẳng, phản lực tại mỗi tiếp điểm của thành phần khớp động bao gồm:
Lực ma sát và lực quán tính.
Áp lực và lực ma sát.
Lực quán tính và ngoại lực.
Nội lực, ngoại lực và lực quán tính.
Số phương trình lực lập được cho 1 khâu trong cơ cấu phẳng của bài toán áp lực khớp động là:
2.
4.
6.
1.
Trong cơ cấu phẳng, điều kiện tĩnh định để giải bài toán áp lực khớp động là:
3n – 2p5 = 0.
6n = Σkpk.
6n – 2p5 – p4 = 0.
3n – 2p5 – p4 = 0.
Các bước để tính áp lực khớp động trong cơ cấu phẳng:
Tách nhóm tĩnh định, tách các khâu trong nhóm tĩnh định, viết các phương trình cân bằng lực cho từng khâu, giải các phương trình viết cho các khâu thuộc 1 nhóm tĩnh định.
Tách nhóm tĩnh định, viết các phương trình cân bằng lực cho từng nhóm, giải các phương trình viết cho các nhóm tĩnh định.
Tách nhóm tĩnh định, tách các khâu trong cơ cấu, viết các phương trình cân bằng lực cho từng khâu, giải các phương trình viết cho các khâu.
Tách nhóm tĩnh định, tách các khâu trong nhóm tĩnh định, viết các phương trình cân bằng lực cho từng khâu, giải các phương trình viết cho tất cả các khâu.
Các loại lực tác động trên cơ cấu phẳng là:
Lực phát động, lực cản kỹ thuật, trọng lượng các khâu.
Áp lực khớp động, trọng lượng các khâu và lực quán tính.
Lực ma sát, lực phát động, trọng lượng các khâu.
Ngoại lực, nội lực, lực quán tính.
Trong cơ cấu phẳng, điều kiện tĩnh định của bài toán xác định áp lực khớp động là:
Số phương trình lập được phải bằng số ẩn có trong các phương trình đó.
Tách cơ cấu thành các chuỗi động hở để phản lực ở các khớp chờ trở thành ngoại lực.
Số phương trình lập được trong một nhóm tĩnh định phải là 6 phương trình.
Tách nhóm tĩnh định, tách các khâu trong nhóm tĩnh định, viết các phương trình cân bằng lực cho từng khâu, giải các phương trình viết cho các khâu thuộc 1 nhóm tĩnh định.
Trong cơ cấu phẳng, để tính áp lực trên khâu dẫn cần bao nhiêu phương trình?
2.
1.
4.
6.
Chọn phát biểu đúng về hệ số ma sát:
Hệ số ma sát tĩnh luôn lớn hơn hệ số ma sát động.
Hệ số ma sát tĩnh luôn nhỏ hơn hệ số ma sát động.
Hệ số ma sát tĩnh thường lớn hơn hệ số ma sát động.
Hệ số ma sát tĩnh thường nhỏ hơn hệ số ma sát động.
Chọn phát biểu đúng về lực ma sát động:
Lực ma sát động phụ thuộc lực phát động P và phản lực N.
Lực ma sát động không phụ thuộc lực phát động P nhưng phụ thuộc phản lực N.
Lực phát động P và phản lực N không ảnh hưởng đến lực ma sát động.
Lực ma sát động phụ thuộc lực phát động P nhưng không phụ thuộc phản lực N.
Đặt vật trên mặt phẳng nghiêng, vật không thể chuyển động được. Ta có thể khẳng định:
Giữa vật và mặt phẳng nghiêng có lực ma sát.
Giữa vật và mặt phẳng nghiêng không có lực ma sát.
Giữa vật và mặt phẳng nghiêng có lực ma sát hay không tùy thuộc vào hệ số ma sát giữa 2 bề mặt.
Giữa vật và mặt phẳng nghiêng có lực ma sát hay không tùy thuộc vào khối lượng của vật.
Cho vật A nằm trên mặt phẳng ngang như hình vẽ. Vật A có trọng lượng Q. Tác dụng lên vật A lực P nằm ngang sát với mặt phẳng tiếp xúc. Ta có thể khẳng định:
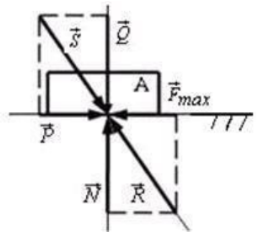
Vật A luôn chuyển động.
Vật A bị tự hãm.
Vật A chuyển động hay không tùy thuộc lực ma sát.
Vật A chuyển động chậm dần.
Chọn phát biểu đúng về ma sát:
Ma sát có lợi hay hại cho máy còn tùy thuộc việc ma sát xảy ra ở đâu.
Ma sát có hại cho máy.
Ma sát có lợi cho máy.
Ma sát luôn làm cho máy sinh nhiệt nên nó có hại cho máy.
Đặt vật trên mặt phẳng nằm ngang, ta có thể khẳng định:
Giữa vật và mặt phẳng nằm ngang không có lực ma sát.
Giữa vật và mặt phẳng nằm ngang có lực ma sát.
Giữa vật và mặt phẳng nằm ngang có lực ma sát hay không tùy thuộc vào hệ số ma sát giữa 2 bề mặt.
Giữa vật và mặt phẳng nằm ngang có lực ma sát hay không tùy thuộc vào khối lượng của vật.
Cho vật A nằm trên mặt phẳng nghiêng 1 góc α. Vật A có trọng lượng Q. Góc ma sát giữa vật và mặt phẳng là φ. Tác dụng lên vật A lực P nằm ngang. Điều kiện để vật A chuyển động đều là:
P = Q.tg(α ± φ)
α ≤ φ
α + φ ≥ π/2
Q = P.tg(α ± φ)
Công việc của cân bằng máy là:
Khử các khối lượng tập trung mất cân bằng.
Tìm lực quán tính và moment lực quán tính.
Xác định trọng tâm của vật.
Đưa khối tâm của vật về trùng với tâm quay.
Vật quay có mấy trạng thái mất cân bằng?
3.
1.
4.
5.
Cho vật quay mất cân bằng. Muốn cân bằng vật quay, ta phải:
Cân bằng tĩnh.
Cân bằng động.
Vừa cân bằng tĩnh vừa cân bằng động.
Cân bằng tĩnh hay cân bằng động tùy thuộc chiều dày của vật quay so với bán kính của chúng.
Vật quay có bề dày nhỏ là:
Vật quay có kích thước dọc tâm so với kích thước hướng tâm nhỏ đến mức có thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 1 mặt phẳng vuông góc với trục quay.
Vật quay có kích thước dọc tâm so với kích thước hướng tâm lớn đến mức có thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 1 mặt phẳng vuông góc với trục quay.
Vật quay có kích thước dọc tâm so với kích thước hướng tâm nhỏ đến mức có thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 2 mặt phẳng vuông góc với trục quay.
Vật quay có kích thước dọc tâm so với kích thước hướng tâm lớn đến mức có thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 2 mặt phẳng vuông góc với trục quay.
Vật quay có bề dày lớn là:
Vật quay có kích thước dọc tâm so với kích thước hướng tâm lớn đến mức không thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 1 mặt phẳng vuông góc với trục quay.
Vật quay có kích thước dọc tâm so với kích thước hướng tâm nhỏ đến mức không thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 1 mặt phẳng vuông góc với trục quay.
Vật quay có kích thước dọc tâm so với kích thước hướng tâm lớn đến mức không thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 2 mặt phẳng vuông góc với trục quay.
Vật quay có kích thước dọc tâm so với kích thước hướng tâm nhỏ đến mức không thể xem toàn bộ khối lượng vật quay chỉ phân bố trên 2 mặt phẳng vuông góc với trục quay.
Muốn cân bằng động một vật quay nói chung, người ta:
Thêm vào ít nhất 1 đối trọng và chỉ cần tiến hành trên 1 mặt phẳng duy nhất.
Làm triệt tiêu moment lực quán tính.
Thêm vào 2 đối trọng trên 2 mặt phẳng tùy ý vuông góc với trục quay.
Làm triệt tiêu lực quán tính.
Chọn phát biểu đúng về vật quay mất cân bằng động thuần túy:
Vật mất cân bằng ở cả 2 trạng thái tĩnh và động.
Vật chỉ mất cân bằng ở trạng thái động mà vẫn cân bằng ở trạng thái tĩnh.
Vật chỉ mất cân bằng ở trạng thái tĩnh mà vẫn cân bằng ở trạng thái động.
Vật mất cân bằng ở trạng thái nào tùy thuộc thời điểm khảo sát.
Phân loại cơ cấu bánh răng theo biên dạng răng, ta có:
Cơ cấu bánh răng phẳng, cơ cấu bánh răng không gian.
Cơ cấu bánh răng trụ, cơ cấu bánh răng nón.
Cơ cấu bánh răng nghiêng, cơ cấu bánh răng thẳng.
Cơ cấu bánh răng thân khai, cơ cấu bánh răng novicop, cơ cấu bánh răng xycloic.
Cho cơ cấu bánh răng ăn khớp như hình vẽ. Chọn phát biểu đúng:
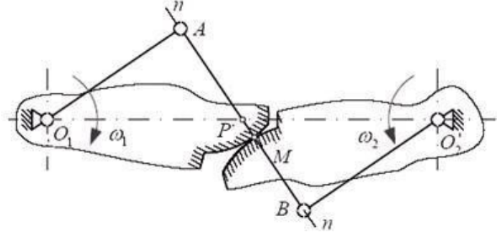
Vòng tròn tâm O1, O2 bán kính tương ứng O1P, O2P là vòng tròn lăn.
Vòng tròn tâm O1, O2 bán kính tương ứng O1P, O2P là vòng tròn chia.
Vòng tròn tâm O1, O2 bán kính tương ứng O1A, O2B là vòng tròn trung bình.
Vòng tròn tâm O1, O2 bán kính tương ứng O1A, O2B là vòng tròn ăn khớp.
Khoảng cách trục của cặp bánh răng thân khai đang ăn khớp chính là:
Tổng bán kính của hai vòng chia.
Tổng bán kính của hai vòng đỉnh.
Tổng bán kính của hai vòng chân.
Tổng bán kính của hai vòng lăn.
Phát biểu nào đúng về tính chất của đường thân khai?
Tâm cong của đường thân khai tại một điểm bất kỳ M là điểm N nằm trên vòng tròn cơ sở.
Mọi đường thân khai đều song song hoặc trùng với nhau.
Mọi điểm thuộc đường thân khai đều nằm trên vòng tròn cơ sở.
Mỗi đường thân khai đều có 1 vòng tròn cơ sở.