
25 câu hỏi
Khớp Các-đăng dùng để:
Truyền chuyển động giữa 2 trục chéo nhau với góc α không lớn lắm, góc α cố định trong quá trình truyền chuyển động.
Truyền chuyển động giữa 2 trục giao nhau góc α không lớn lắm.
Truyền chuyển động giữa 2 trục song song với nhau.
Tất cả đều đúng.
Cho góc giữa hai trục của cơ cấu Các-đăng là 30º. Hệ số dao động:
0,536.
0,135.
0,669.
0,289.
Cho cơ cấu Man (Malt) như hình vẽ, xác định số chốt tối đa có thể có trên đĩa 1:
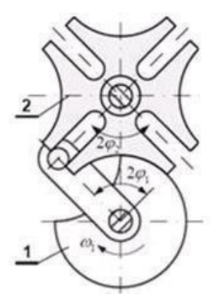
k ≤ 2.
k = 3.
k = 1.
k ≤ 4.
Đối với cơ cấu Man (Malt) có đĩa 1 để lắp chốt, đĩa 2 cắt rãnh, số rãnh tối thiểu có thể có trên đĩa 2 là:
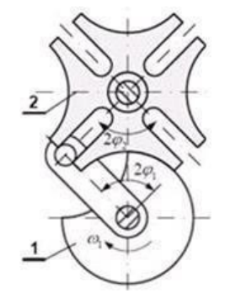
3.
4.
2.
6.
Nội dung của phân tích động học cơ cấu là:
Bài toán động học và bài toán động lực học.
Bài toán vị trí, bài toán vận tốc và bài toán gia tốc.
Bài toán áp lực khớp động.
Bài toán cân bằng tĩnh và bài toán cân bằng động.
Trong phân tích động học, mục tiêu giải bài toán vị trí là:
Xác định các thông số phản ánh chất lượng làm việc của máy.
Phối hợp và sử dụng chuyển động của các cơ cấu để hoàn thành nhiệm vụ của các máy đặt ra, bố trí không gian, vỏ máy…
Tìm ra quy luật chuyển động của máy.
Xác định tọa độ máy.
Trong phân tích động học, ưu điểm của phương pháp đồ thị và họa đồ véctơ là:
Kết quả cho liên tục, dễ nhận biết và dễ kiểm tra.
Cho mối quan hệ giữa các đại lượng bằng biểu thức giải tích.
Đơn giản, cụ thể, dễ nhận biết và dễ kiểm tra.
Tất cả đều đúng.
Trong phân tích động học, phương pháp giải tích có:
Mối quan hệ giữa các đại lượng bằng biểu thức toán học.
Ưu điểm là đơn giản, cụ thể, dễ nhận biết và dễ kiểm tra.
Nhược điểm là thiếu chính xác, không ứng dụng vào máy tính được.
Tất cả đều đúng.
Trong phân tích động học, ưu điểm của phương pháp giải tích là:
Cho mối quan hệ giữa các đại lượng bằng biểu thức giải tích, dễ dàng cho việc khảo sát dùng máy tính và có độ chính xác cao.
Đơn giản, cụ thể, dễ nhận biết và dễ kiểm tra.
Trực quan, mối quan hệ giữa các đại lượng là biểu thức giải tích.
Dễ tính toán, áp dụng dễ dàng cho mọi cơ cấu.
Trong phân tích động học, nhược điểm của phương pháp giải tích là:
Khó kiểm tra, trong một số cơ cấu việc lập phương trình toán học phức tạp.
Cho kết quả rời rạc.
Phương pháp này không giải được nhiều bài toán nguyên lý máy.
Mối quan hệ giữa các thông số động học thường là khâu dẫn.
Cho bài toán nguyên lý máy. Chúng ta có thể giải bài toán này:
Bằng phương pháp nào tùy thuộc vào nội dung bài toán.
Bằng phương pháp giải tích.
Bằng phương pháp đồ thị.
Bằng phương pháp họa đồ véctơ.
Trong phân tích động học, định lý liên hệ vận tốc áp dụng cho việc giải bài toán bằng:
Phương pháp họa đồ véctơ.
Phương pháp giải tích.
Phương pháp đồ thị.
Tất cả các phương pháp.
Ý nghĩa của tỉ lệ xích trong việc vẽ họa đồ véctơ là:
Phóng to hoặc thu nhỏ kích thước của các khâu một số lần thích hợp.
Một đại lượng chỉ hướng.
Một hằng số thêm vào để thuận tiện trong việc tính toán.
Tất cả đều đúng.
Trong bài toán động học cơ cấu, sử dụng phương pháp nào là thuận lợi nhất?
Sử dụng phương pháp nào tùy thuộc loại bài toán.
Phương pháp giải tích.
Phương pháp họa đồ véctơ.
Sử dụng phương pháp nào tùy thuộc người giải.
Trong bài toán động học cơ cấu, mục đích của việc giải ba bài toán: bài toán vị trí, bài toán vận tốc và bài toán gia tốc là:
Xác định kích thước và chất lượng làm việc của máy.
Tìm giá trị của lực để tính độ bền cho máy.
Tìm ra các vị trí nguy hiểm mà máy dễ bị hư hỏng.
Xác định khối lượng và kích thước của máy.
Trong phân tích động học cơ cấu, thông số nào phản ánh chất lượng làm việc của máy:
Vận tốc và gia tốc.
Vị trí của cơ cấu.
Phương pháp giải tích, họa đồ véctơ và đồ thị.
Vị trí, vận tốc và gia tốc.
Chọn phát biểu sai về nội lực:
Nội lực là lực cản kỹ thuật.
Nội lực là lực tác dụng qua lại lẫn nhau giữa các khâu trong cơ cấu.
Nội lực là phản lực liên kết.
Nội lực là gồm lực ma sát và áp lực.
Áp lực khớp động chính là:
Lực ma sát.
Thành phần không sinh công trong chuyển động tương đối giữa các khâu.
Phản lực liên kết.
Nội lực.
Trong cơ cấu bánh răng thân khai, chọn phát biểu đúng:
Góc ăn khớp, đường ăn khớp và vòng lăn không phụ thuộc điều kiện chế tạo nhưng phụ thuộc vị trí tương đối giữa 2 bánh răng.
Góc ăn khớp, đường ăn khớp và vòng lăn phụ thuộc điều kiện chế tạo và khoảng cách trục giữa 2 bánh răng.
Góc ăn khớp, đường ăn khớp và vòng lăn phụ thuộc điều kiện chế tạo nhưng không phụ thuộc vị trí tương đối giữa 2 bánh răng.
Điều kiện chế tạo và khoảng cách trục giữa 2 bánh răng không ảnh hưởng đến góc ăn khớp, đường ăn khớp và vòng lăn.
Trong bánh răng thân khai, các thông Wx, Sx, tx, re, r0, ri lần lượt là:
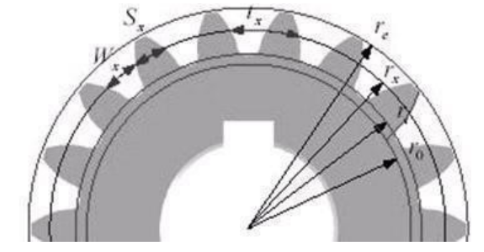
Chiều rộng rãnh, chiều dày răng, bước răng, bán kính vòng đỉnh, bán kính vòng lăn, bán kính vòng chân.
Chiều rộng rãnh, chiều dày răng, bước răng, bán kính vòng đỉnh, bán kính vòng cơ sở, bán kính vòng chân.
Chiều dày răng, chiều rộng rãnh, bước răng, bán kính vòng đỉnh, bán kính vòng cơ sở, bán kính vòng chân.
Chiều dày răng, chiều rộng rãnh, bước răng, bán kính vòng đỉnh, bán kính vòng lăn, bán kính vòng chân.
Cho bánh răng tiêu chuẩn có số răng 30, đường kính vòng chia 75mm. Bước răng:
3,93 (mm)
5,5 (mm)
7,07 (mm)
7,85 (mm)
Trong hệ bánh răng, công dụng của hệ vi sai là:
Tổng hợp hoặc phân chia chuyển động quay.
Thực hiện một tỉ số truyền lớn.
Thay đổi tỉ số truyền, thay đổi chiều quay.
Truyền chuyển động giữa các trục xa nhau với tỉ số truyền chính xác.
Hệ bánh răng thường là:
Hệ gồm các bánh răng có đường tâm trục cố định.
Hệ gồm các bánh răng chuyển động quanh một bánh răng cố định.
Hệ trong đó mỗi cặp bánh răng ăn khớp có ít nhất một bánh răng có tâm quay di động.
Hệ gồm các bánh răng lần lượt ăn khớp với nhau tạo thành một chuỗi.
Hệ bánh răng vi sai là:
Hệ trong đó mỗi cặp bánh răng ăn khớp có ít nhất một bánh răng có tâm quay di động.
Hệ trong đó các bánh răng có đường tâm trục cố định.
Hệ trong đó có các khối bánh răng di trượt có thể di động trên trục quay.
Hệ gồm có hệ bánh răng hành tinh và hệ bánh răng thường.
Cho cơ cấu bánh răng như hình vẽ. Đây là cơ cấu:
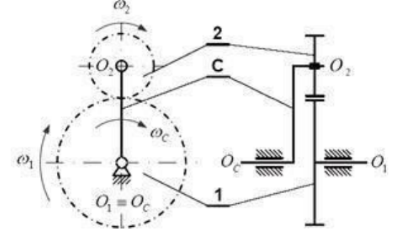
Bánh răng vi sai.
Bánh răng thường.
Bánh răng hỗn hợp.
Bánh vít – trục vít.