Giải SGK Toán 12 CTST Bài 3. Biểu thức tọa độ của các phép toán vectơ có đáp án
35 câu hỏi
Trong không gian Oxyz, có thể thực hiện các phép toán vectơ dựa trên tọa độ của chúng tương tự như đã làm trong mặt phẳng Oxy không?a→=x;y;z,a'→=x';y';z'a→+a'→=?
Trong không gian Oxyz, cho hai vectơ a→=a1;a2;a3, b→=b1;b2;b3 với số thực m.
a) Biểu diễn từng vectơ a và b theo ba vectơ i→,j→,k→.
b) Biểu diễn các vectơ a→+b→,a→−b→,ma→theo ba vectơ i→,j→,k→, từ đó suy ra tọa độ của các vectơ a→+b→,a→−b→,ma→.
Cho ba vectơ a→=2;−5;3,b→=0;2;−1,c→=1;7;2.
a) Tìm tọa độ của vectơ d→=4a→−13b→+3c→.
b) Tìm tọa độ của vectơ e→=a→−4b→−2c→.
c) Chứng minh a→ cùng phương với vectơ m→=−6;15;−9.
Một thiết bị thăm dò đáy biển đang lặn với vận tốc v→=10;8;−3 (Hình 1). Cho biết vận tốc của dòng hải lưu của vùng biển là w→=3,5;1;0.
a) Tìm tọa độ của vectơ tổng hai vận tốc u và v.
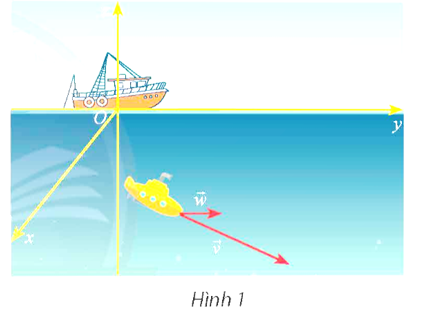
b) Giả sử thiết bị thăm dò lặn với vận tốc u→=7;2;0, hãy nêu nhận xét về vectơ vận tốc của nó so với vectơ vận tốc của dòng hải lưu.
Cho hai vectơ a→=a1;a2;a3 và b→=b1;b2;b3.
a) Biểu diễn từng vectơ a và b theo ba vectơ i,j,k.
b) Tính các tích vô hướng i→2,j→2,k→2,i→.j→,j→.k→,k→.i→.
c) Tính tích vô hướng a→.b→ theo tọa độ của hai vectơ a và b.
Cho ba vectơ m→=−5;4;9, n→=2;−7;0, p→=6;3;−4.
a) Tính m→.n→,m→.p→.
b) Tính m→,n→,cosm→,n→.
c) Cho q→=1;−2;0. Vectơ q có vuông góc với p không?
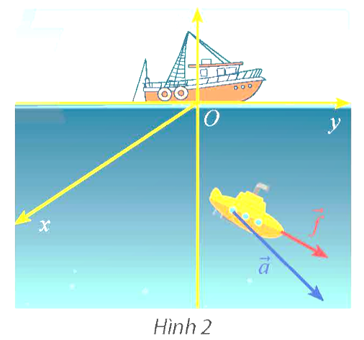
Một thiết bị thăm dò đáy biển (Hình 2) được đẩy bởi một lực f→=5;4;−2 (đơn vị: N) giúp thiết bị thực hiện độ dời a→=70;20;−40 (đơn vị: m). Tính công sinh bởi lực f→.
Cho hai điểm AxA;yA;zA,BxB;yB;zB. Từ biểu thức AB→=OB→−OA→, tìm tọa độ của vectơ AB→ theo tọa độ hai điểm A, B.
Cho ba điểm M(7; −2; 0), N(−9; 0; 4), P(0; −6; 5).
a) Tìm tọa độ của các vectơ MN→,NP→,MP→.
b) Tính các độ dài MN, NP, MP.
Cho tam giác ABC có A(xA; yA; zA), B(xB; yB; zB), C(xC; yC; zC). Gọi M(xM; yM; zM) là trung điểm của đoạn thẳng AB và G(xG; yG; zG) là trọng tâm của tam giác ABC. Sử dụng các hệ thức vectơ OM→=12OA→+OB→;OG→=13OA→+OB→+OC→, tìm tọa độ của các điểm M và G.
Cho tam giác MNP có M(2; 1; 3), N(1; 2; 3), P(−3;−1; 0). Tìm tọa độ:
a) Các điểm M', N', P' lần lượt là trung điểm của các cạnh NP, MP, MN;
b) Trọng tâm G của tam giác M'N'P'.
Cho hình chóp S.ABC có SA ^ (ABC), SA = a và đáy ABC là tam giác đều cạnh a, O là trung điểm của BC. Bằng cách thiết lập hệ tọa độ như Hình 3, hãy tìm tọa độ:
a) Các điểm A, S, B, C.
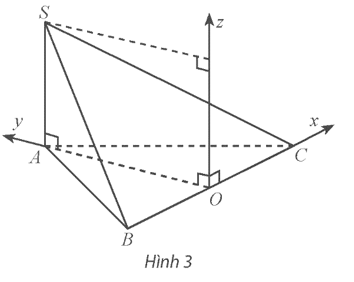
b) Trung điểm M của SB và trung điểm N của SC.
c) Trọng tâm G của tam giác SBC.
Cho tam giác MNP có M(0; 1; 2), N(5; 9; 3), P(7; 8; 2).
a) Tìm tọa độ điểm K là chân đường cao kẻ từ M của tam giác MNP.
Trên phần mềm mô phỏng việc điều khiển drone giao hàng trong không gian Oxyz, một đội gồm ba drone giao hàng A, B, C đang có tọa độ là A(1; 1; 1), B(5; 7; 9), C(9; 11; 4). Tính:
a) Các khoảng cách giữa mỗi cặp drone giao hàng.
Trên phần mềm mô phỏng việc điều khiển drone giao hàng trong không gian Oxyz, một đội gồm ba drone giao hàng A, B, C đang có tọa độ là A(1; 1; 1), B(5; 7; 9), C(9; 11; 4). Tính:
b) Góc BAC^.
Tính:
a) a→.b→ với a→=5;2;−4,b→=4;−2;2.
b) c→.d→ với c→=2;−3;4,d→=6;5;−3.
Cho hai vectơ a→=0;1;3 và b→=−2;3;1. Tìm tọa độ của vectơ 2b→−32a→.
Cho ba điểm A(2; 1; −1), B(3; 2; 0) và C(2; −1; 3).
a) Chứng minh A, B, C là ba đỉnh của một tam giác. Tính chu vi tam giác ABC.
b) Tìm tọa độ trung điểm của các cạnh của tam giác ABC.
c) Tìm tọa độ trọng tâm G của tam giác ABC.
Cho điểm M(1; 2; 3). Hãy tìm tọa độ của các điểm:
a) M1, M2, M3 lần lượt là hình chiếu vuông góc của M trên các mặt phẳng (Oxy), (Oyz), (Oxz).
b) Gọi M', M", M"' lần lượt là các điểm thỏa mãn:
• O là trung điểm của MM';
• MM" vuông góc với mặt phẳng (Oxy) tại điểm H sao cho H là trung điểm của MM".
• MM"' vuông góc và cắt trục Oy tại điểm K sao cho K là trung điểm của MM"'.
Cho ba điểm A(3; 3; 3), B(1; 1; 2) và C(5; 3; 1).
a) Tìm điểm M trên trục Oy cách đều hai điểm B, C.
b) Tìm điểm N trên mặt phẳng (Oxy) cách đều ba điểm A, B, C.
Cho các điểm A(−1; −1; 0), B(0; 3; −1), C(−1; 14; 0), D(−3; 6; 2). Chứng minh rằng ABCD là hình thang.
Cho hình hộp ABCD.A'B'C'D' có A(1; 0; 1), B(2; 1; 2), D(1; −1; 1), C'(4; 5; −5). Tìm tọa độ các đỉnh còn lại của hình hộp.
Tính công sinh bởi lực F→20;30;−10 (đơn vị: N) tạo bởi một drone giao hàng (Hình 7) khi thực hiện một độ dịch chuyển d→=150;200;100 (đơn vị: m).