
214 CÂU HỎI
Lĩnh vực kĩ thuật liên quan đến nghiên cứu và ứng dụng linh kiện điện tử, vi điều khiển,... để chế tạo ra sản phẩm phục vụ đời sống và sản xuất là
A. kĩ thuật điện tử.
B. kĩ thuật điện.
C. cơ khí.
D. xây dựng.
Trong lĩnh vực kĩ thuật điện tử, nhóm công việc thực hiện tạo ra bản thiết kế mạch nguyên lí, bản mạch in và các thành phần cần thiết khác của thiết bị nhằm đáp ứng được yêu cầu đặt ra là nhiệm vụ của nghề
A. thiết kế thiết bị điện tử.
B. sản xuất, chế tạo thiết bị điện tử.
C. lắp ráp thiết bị điện tử.
D. vận hành thiết bị điện tử.
Triển vọng phát triển của kĩ thuật điện tử trong triển khai và ứng dụng rộng rãi công nghệ số trong đời sống là
A. nền tảng thành phố thông minh.
B. ứng dụng các thiết bị điện gia dụng thông minh.
C. chuỗi cung ứng theo yêu cầu của khách hàng.
D. vận hành thiết bị điện tử.
Việc sử dụng các dây chuyền công nghệ hoặc máy và công cụ hỗ trợ để tạo ra thiết bị điện tử từ vật liệu, linh kiện theo bản thiết kế ban đầu và quy trình kiểm soát chất lượng là công việc thuộc lĩnh vực
A. Thiết kế thiết bị điện tử.
B. Sản xuất, chế tạo thiết bị điện tử.
C. Lắp ráp thiết bị điện tử.
D. Vận hành thiết bị điện tử.
Công việc kết nối và kiểm tra hoạt động của thiết bị điện tử theo tiêu chuẩn kĩ thuật và an toàn là các hoạt động
A. thiết kế thiết bị điện tử.
B. sản xuất, chế tạo thiết bị điện tử.
C. lắp ráp thiết bị điện tử.
D. bảo dưỡng và sửa chữa thiết bị điện tử.
Hoạt động nhằm duy trì chế độ làm việc bình thường của thiết bị điện đáp ứng các yêu cầu chất lượng, độ tin cậy và kinh tế là công việc thuộc lĩnh vực
A. thiết kế thiết bị điện tử.
B. sản xuất, chế tạo thiết bị điện tử.
C. lắp ráp thiết bị điện tử.
D. vận hành thiết bị điện tử.
Công việc kiểm tra, chuẩn đoán trạng thái kĩ thuật, theo dõi thường xuyên, ngăn ngừa các sự cố và khắc phục những sai hỏng đảm bảo sự hoạt động ổn định và an toàn của thiết bị điện tử là những hoạt động
A. thiết kế thiết bị điện tử.
B. sản xuất, chế tạo thiết bị điện tử.
C. lắp ráp thiết bị điện tử.
D. bảo dưỡng và sửa chữa thiết bị điện tử.
Người thường làm việc tại các phòng kĩ thuật của các cơ quan, tổ chức, nhà máy, xí nghiệp có sử dụng thiết bị điện tử là người đang làm công việc
A. thiết kế thiết bị điện tử.
B. sản xuất, chế tạo thiết bị điện tử.
C. lắp ráp thiết bị điện tử.
D. vận hành thiết bị điện tử.
Hệ thống bật tắt đèn tự động theo ánh sáng tự nhiên là một trong những ứng dụng của lĩnh vực
A. kĩ thuật điện tử.
B. kĩ thuật điện.
C. lắp ráp thiết bị điện tử.
D. vận hành thiết bị điện tử.
Trong thời gian dịch bệnh Covid-19 diễn ra phức tạp, những thiết bị điện tử được sử dụng trong dạy và học trực tuyến là
A. điện thoại thông minh, laptop.
B. điện thoại cố định, radio.
C. điện thoại cố định, laptop.
D. laptop, radio, điện thoại thông minh.
Trong lĩnh vực kĩ thuật điện tử, công việc lắp đặt các thiết bị điện tử được thực hiện bởi
A. kĩ sư kĩ thuật điện tử.
B. kĩ sư xây dựng.
C. kĩ sư chế tạo máy.
D. kĩ sư cơ khí.
Hiện nay, cơ quan cảnh sát giao thông thực hiện xử phạt qua hình ảnh bằng hệ thống camera giám sát đường bộ, đó là ứng dụng của kĩ thuật điện tử vào
A. dịch vụ trong giao thông.
B. dịch vụ giáo dục và đào tạo.
C. dịch vụ viễn thông.
D. dịch vụ tài chính.
Giá trị điện trở là đại lượng đặc trưng cho biết
A. mức độ cản trở dòng điện của điện trở.
B. mức độ cản trở dòng điện của cuộn dây.
C. công suất tiêu hao trên điện trở.
D. công suất tiêu hao trên cuộn dây.
Giá trị điện trở có đơn vị là
A. Ohm (Ω).
B. Henry (H).
C. Fara (F).
D. Ampe (A).
Đại lượng cho biết khả năng làm việc được trong thời gian dài, không bị cháy hoặc đứt của điện trở là
A. công suất định mức.
B. công suất hao phí.
C. trị số điện dung.
D. trị số điện cảm.
Gọi C là điện dung của tụ điện, f là tần số dòng điện, ω là tần số góc của dòng điện và XC là dung kháng của tụ điện. Khi có điện áp đặt vào hai đầu tụ điện thì dung kháng của tụ điện được tính bằng công thức:
A. \({{\rm{X}}_{\rm{C}}} = \omega {\rm{C}}.\)
B. \({{\rm{X}}_{\rm{C}}} = 2\omega {\rm{C}}.\)
C. \({{\rm{X}}_{\rm{C}}} = \frac{1}{{2\pi {\rm{fC}}}}.\)
D. \({{\rm{X}}_{\rm{C}}} = \frac{{\pi {\rm{fC}}}}{2}.\)
Điện dung của tụ điện có đơn vị là
A. Ohm (Ω).
B. Henry (H).
C. Fara (F).
D. Ampe (A).
Những hình vẽ bên dưới là kí hiệu của linh kiện điện tử nào sau đây?

A. Điện trở nhiệt.
B. Cuộn cảm.
C. Tụ điện.
D. Điện trở quang.
Đại lượng đặc trưng khả năng tích luỹ năng lượng từ trường khi có dòng điện chạy qua nó là
A. dung kháng.
B. cảm kháng.
C. trị số điện dung.
D. trị số điện cảm.
Gọi L là độ tự cảm của cuộn dây, f là tần số dòng điện, ω là tần số góc của dòng điện và XL là cảm kháng của cuộn dây. Khi có điện áp đặt vào hai đầu cuộn cảm thì cảm kháng của cuộn dây được tính bằng công thức:
A. \({{\rm{X}}_{\rm{L}}} = \omega {\rm{L}}.\)
B. \({{\rm{X}}_{\rm{L}}} = 2\omega {\rm{L}}.\)
C. \({{\rm{X}}_{\rm{L}}} = \frac{1}{{2\pi {\rm{fL}}}}.\)
D. \({{\rm{X}}_{\rm{L}}} = \frac{{\pi {\rm{fL}}}}{2}.\)
Độ tự cảm của cuộn cảm có đơn vị là
A. Ohm (Ω).
B. Henry (H).
C. Fara (F).
D. Ampe (A).
Những hình vẽ bên là kí hiệu của linh kiện điện tửnào sau đây?
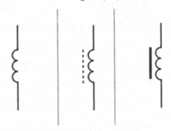
A. Điện trở nhiệt.
B. Cuộn cảm.
C. Tụ điện.
D. Điện trở quang.
Linh kiện điện tử có cấu tạo như hình bên là
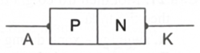
A. điện trở nhiệt.
B. diode.
C. transistor.
D. điện trở quang.
Linh kiện thường được sử dụng để thực hiện chức năng khuếch đại tín hiệu, chuyển mạch điện tử với hai trạng thái đóng và mở là
A. điện trở nhiệt.
B. diode.
C. transistor.
D. điện trở quang.
Diode (diode thường) là linh kiện điện tử tích cực thường được dùng để
A. chỉnh lưu dòng điện.
B. khuếch đại tín hiệu.
C. ổn định tín hiệu.
D. tách sóng cao tần.
Linh kiện điện tử có cấu tạo như hình bên là
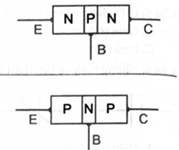
A. điện trở nhiệt.
B. diode.
C. transistor.
D. điện trở quang.
Linh kiện điện tử có giá trị phụ thuộc vào cường độ chiếu sáng là
A. điện trở nhiệt.
B. cuộn cảm.
C. tụ điện.
D. Điện trở quang.
Hình bên là kí hiệu của linh kiện điện tử nào sau đây?

A. Transistor NPN.
B. Transistor PNP.
C. Điện trở nhiệt.
D. điện trở quang.
Transistor lưỡng cực là linh kiện điện tử có các điện cực là
A. anode, cathode.
B. anode, cathode, gate.
C. base, collector, emitter.
D. base, collector, gate.
Linh kiện điện tử có cấu tạo gồm 3 lớp vật liệu bán dẫn là
A. diode.
B. cuộn cảm.
C. tụ điện.
D. transistor.
Linh kiện điện tử có cấu tạo gồm 2 lớp vật liệu bán dẫn là
A. diode.
B. cuộn cảm.
C. tụ điện.
D. transistor.
Những tiêu chí nào thường được sử dụng để phân loại IC?
A. IC tương tự, IC số.
B. một hàng chân, hai hàng chân.
C. mật độ tích hợp, đặc điểm tín hiệu xử lí, công dụng.
D. mật độ tích hợp, đặc điểm xử lí, số chân IC.
Một điện trở có giá trị 56 Ω ± 5% thì trên thân sẽ có các vòng màu tương ứng theo thứ tự là
A. xanh lục – xanh dương – đen — nhũ vàng.
B. xanh lục – xanh dương – nâu – nhũ vàng.
C. xanh dương – xanh lục – đen — nhũ bạc.
D. xanh dương – xanh lục – nâu — nhũ bạc.
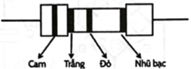
Một điện trở trên thân có các vòng màu theo thứ tự: cam – cam – nhũ vàng – nhũ vàng. Điện trở đó có giá trị R bằng
A. 33 Ω + 5%.
B. 3,3 Ω + 5%.
C. 330 Ω +5%.
D. 0,33 Ω +5%.
Một điện trở trên thân có các vòng màu theo thứ tự: đỏ – đỏ – đen – nhũ vàng. Điện trở đó có giá trị R bằng
A. 33 Ω +2%.
B. 47 Ω +2%.
C. 11 Ω + 5%.
D. 22 Ω +5%.
Một điện trở giá trị 12 M Ω ±5%. Các vòng màu trên thân điện trở theo thứ tự là
A. nâu – đỏ – xanh dương – nhũ vàng.
B. nâu – đỏ – xanh lục – nhũ bạc.
C. đen – đỏ – xanh dương – nhũ vàng.
D. nâu – xanh lục – xanh dương – đỏ.
Một điện trở 4 vòng màu có thứ tự các màu như hình sau.
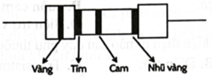
Giá trị của điện trở là
A. 33 Ω +2%.
B. 44 Ω +2%.
C. 47 Ω +5% .
D. 47 k Ω + 5%.
Một điện trở 4 vòng màu có thứ tự các màu như hình sau.
Giá trị của điện trở là
A. 33 Ω +2%.
B. 39 Ω +2%.
C. 47 kΩ + 5%.
D. 3,9 kΩ + 10%.
Tụ điện nào sau đây có thể thay đổi được giá trị điện dung?
A. Tụ giấy.
B. Tụ hoá.
C. Tụ gốm.
D. Tụ xoay.
Trên thân một tụ điện có ghi 104 J, giá trị đó cho biết trị số điện dung của tụ là
A. 0,1 μF ± 1%.
B. 0,1 μF ± 2%.
C. 0,1 μF ± 0,5%.
D. 0,1 μF ± 5%.
Trên thân tụ điện như hình bên có ghi: 1.5 μF – 400 WV.AC. Những thông số đó cho biết thông tin về:

A. điện áp đặt vào tụ Uđm = 400 V; trị số điện dung C = 1,5 F.
B. điện áp đặt vào tụ Uđm = 400 V; trị số điện dung C = 1,5μF
C. điện áp định mức đặt vào tụ Uđm = 400 V xoay chiều; trị số điện dung C = 1,5 pF.
D. điện áp định mức đặt vào tụ Uđm = 400 V xoay chiều; trị số điện dung C = 1,5 μF.
Trên thân các tụ điện ghi thông số như hình bên, điện dungcủa tụ điện đã cho có giá trị là

A. 0,1 μF ± 1%.
B. 0,1 μF ± 2%.
C. 0,1 μF ± 0,5%.
D. 0,001 μF ± 5%.
Trên thân một cuộn cảm có ghi 102C như hình bên, giá trị đó cho biết trị số điện cảm L của cuộn cảm bằng

A. 1 mH ± 0,2 nH.
B. 0,1 pH ± 0,2 nH.
C. 0,1 uH ± 0,3 nH.
D. 0,1 H ± 0,3 nH.
Khi tần số dòng điện tăng thì
A. cảm kháng của cuộn cảm tăng.
B. độ tự cảm của cuộn cảm tăng.
C. cảm kháng của cuộn cảm giảm.
D. độ tự cảm của cuộn cảm giảm.
Mạch cộng hưởng được tạo thành khi mắc phối hợp cặp linh kiện
A. cuộn cảm và tụ điện.
B. cuộn cảm và điện trở.
C. diode và tụ điện.
D. điện trở và diode.
Thông số của linh kiện điện tử nào sau đây phụ thuộc vào tần số dòng điện?
A. Cuộn cảm.
B. Điện trở.
C. Transistor.
D. Diode.
Trong sơ đồ mạch điện như hình bên dưới, linh kiện được kí hiệu C là
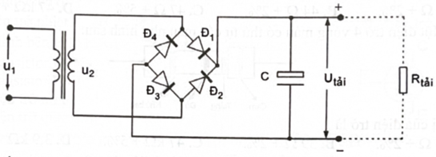
A. tụ giấy.
B. điện trở.
C. cuộn cảm.
D. tụ hoá.
Trong sơ đồ nguyên lí mạch phát hiện dòng điện trong dây dẫn như hình bên, các linh kiện điện tử được sử dụng gồm
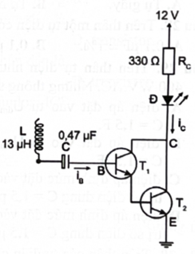
A. 1 cuộn cảm, 1 tụ điện, 1 điện trở, 1 LED và 2 transistor.
B. 1 cuộn cảm, 1 tụ điện, 1 điện trở, 1 diode và 2 transistor.
C. 1 cuộn cảm, 1 tụ điện, 1 điện trở, 1 LED và 1 transistor.
D. 1 cuộn cảm, 1 tụ điện, 1 điện trở, 1 diode và 1 transistor.
Trong những kí hiệu được đánh số thứ tự(1), (2), (3), (4) như hình bên dưới, transistor loại PNP là kí hiệu ở hình số
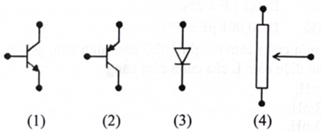
A. (1).
B. (2).
C. (3).
D. (4).
Đối với transistor của Nhật Bản sản xuất bằng chất bán dẫn là Ge, mất nhãn. Để xác định chân B của transistor đó ta sử dụng đồng hồ vạn năng, thực hiện đo ít nhất
A. 2 lần.
B. 3 lần.
C. 4 lần.
D. 5 lần.
Đối với quang điện trở khi có ánh sáng rọi vào thì giá trị điện trở
A. bằng không.
B. giảm.
C. phát sáng.
D. tăng.
Trong những linh kiện điện tử được đánh số thứ tự (1), (2), (3), (4) như hình bên dưới, mạch tích hợp IC là linh kiện ở hình số
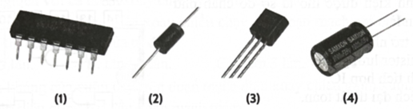
A. (1).
B. (2).
C. (3).
D. (4).
Diode và transistor giống nhau ở
A. vật liệu chế tạo.
B. công dụng.
C. số điện cực.
D. nguyên lí làm việc.
Trong những kí hiệu được đánh số thứ tự (1), (2), (3), (4), (5) như hình bên dưới, tên gọi của các linh kiện theo đúng thứ tự lần lượt là
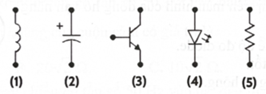
A. cuộn cảm, tụ điện, transistor, LED, điện trở.
B. cuộn cảm, tụ điện, transistor, diode zener, điện trở.
C. điện trở, tụ điện, transistor, LED, cuộn cảm.
D. điện trở, tụ điện, transistor, diode, cuộn cảm.
Cho IC 2 hàng chân như hình bên dưới, chân IC được xác định đúng là
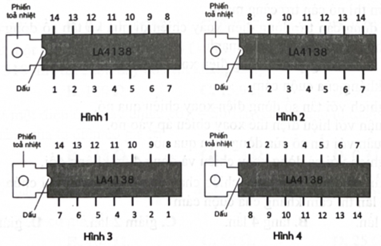
A. hình 1.
B. hình 2.
C. hình 3.
D. hình 4.
Trong các nhóm linh kiện điện tử sau đây, nhóm chỉ chứa các linh kiện thụ động là
A. tụ điện, diode, transistor.
B. điện trở, tụ điện, cuộn cảm.
C. diode, transistor, IC.
D. điện trở, tụ điện, IC.
Trên thân các tụ điện ghi thông số như hình bên, điện dung của tụ điện đã cho có giá trị là

A. 47 pF ±10%.
B. 47 μF ±10%.
C. 4,7 μF ± 0,5%.
D. 4,7 pF ± 5%.
Linh kiện được mô tả sơ đồ chân như hình bên là
A. điện trở nhiệt.
B. transistor lưỡng cực.
C. mạch tích hợp IC.
D. khuếch đại thuật toán.
Để kiểm tra diode còn hoạt động tốt hay không, ta sử d. K dụng đồng hồ vạn năng và thực hiện đo diode như hình bên. Kết quả hiển thị trên màn hình của đồng hồ vạn năng cho biết
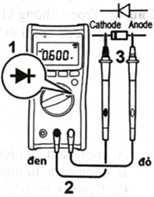
A. hiệu chỉnh sai chế độ đo diode.
B. diode hoạt động tốt.
C. đồng hồ vạn năng bị hỏng.
D. diode bị hỏng.
Trong một mạch điện xoay chiều, cuộn cảm
A. có tác dụng cản trở hoàn toàn dòng điện xoay chiều.
B. có tác dụng cản trở dòng điện xoay chiều đi qua và tần số dòng điện xoay chiều càng lớn thì nó cản trở càng mạnh.
C. có tác dụng cản trở dòng điện xoay chiều đi qua và tần số dòng điện xoay chiều càng nhỏ thì nó cản trở càng mạnh.
D. không ảnh hưởng gì đến dòng điện xoay chiều.
Cảm kháng của cuộn cảm
A. tỉ lệ nghịch với tần số dòng điện xoay chiều qua nó.
B. tỉ lệ thuận với hiệu điện thế xoay chiều áp vào nó.
C. tỉ lệ thuận với tần số của dòng điện qua nó.
D. tỉ lệ nghịch với cả dòng xoay chiều và dòng điện không đổi.
Khi tần số dòng điện xoay chiều chạy qua đoạn mạch chỉ chứa cuộn cảm thuần tăng lên 4 lần thì cảm kháng của cuộn cảm
A. tăng 2 lần.
B. tăng 4 lần.
C. giảm 2 lần.
D. giảm 4 lần.
Khi tần số dòng điện xoay chiều chạy qua đoạn mạch chỉ chứa tụ điện tăng lên 4 lần thì dung kháng của tụ điện
A. tăng 2 lần.
B. tăng 4 lần.
C. giảm 2 lần.
D. giảm 4 lần.
Dung kháng của tụ điện
A. tỉ lệ nghịch với tần số dòng điện xoay chiều qua nó.
B. tỉ lệ thuận với hiệu điện thế xoay chiều áp vào nó.
C. tỉ lệ thuận với tần số dòng điện xoay chiều qua nó.
D. tỉ lệ nghịch với cả dòng xoay chiều và dòng điện không đổi.
Khi tần số của dòng điện xoay chiều chạy qua đoạn mạch chỉ chứa tụ điện tăng lên 9 lần thì dung kháng của tụ điện
A. tăng 3 lần.
B. tăng 9 lần.
C. giảm 3 lần.
D. giảm 9 lần.
Cảm kháng của cuộn dây trên đoạn mạch điện xoay chiều giảm xuống khi
A. điện áp hiệu dụng hai đầu đoạn mạch giảm.
B. tần số dòng điện chạy qua đoạn mạch giảm.
C. điện trở thuần của cuộn dây giảm.
D. mắc thêm vào mạch một tụ điện.
Đặt điện áp xoay chiều có tần số 50 Hz vào hai đầu cuộn cảm thuần có độ tự cảm \(\frac{{0,2}}{\pi }{\rm{H}}.\) Cảm kháng của cuộn cảm có giá trị là
Α. 10 Ω.
B. \(20\sqrt 2 \Omega .\)
C. \(10\sqrt 2 \Omega .\)
D. 20 Ω.
Đặt điện áp xoay chiều có tần số 50 Hz vào hai đầu tụ điện có điện dung của tụbằng \(\frac{2}{\pi }\) mF. Dung kháng của tụ điện có giá trị là
Α. 200 Ω.
B. \(20\sqrt 2 \Omega .\)
C. \(10\sqrt 2 \Omega .\)
D. 5 Ω.
Trên thân một tụ điện có ghi 103K, giá trị đó cho biết trị số điện dung của tụ điện là
A. 0,1 μF ± 1%.
B. 0,1 μF ± 2%.
C. 0,1 μF ± 5%.
D. 0,01 μF ±10%.
Khi đặt một điện áp xoay chiều có f = 50 Hz vào hai đầu cuộn cảm thuần có độ tự cảm L = 318 mH thì cuộn dây có cảm kháng bằng
Α. 105 Ω.
B. 100 Ω.
C. 15,9 Ω.
D. 0,01 Ω.
Khi đặt một điện áp xoay chiều có f = 50 Hz vào hai đầu tụ điện có C = 100 μF thì dung kháng của tụ điện có giá trị
A. 31,8 Ω.
B. 318 Ω.
C. 3,18 Ω.
D. 0,318 Ω.
Đặt vào hai đầu tụ điện \(C = \frac{{{{10}^{ - 4}}}}{\pi }F\) một điện áp xoay chiều tần số 100 Hz, dung kháng của tụ điện có giá trị
A. 200 Ω.
B. 100 Ω.
C. 50 Ω.
D. 25 Ω.
Đặt vào hai đầu tụ điện \(C = \frac{{{{10}^{ - 4}}}}{\pi }F\) một điện áp xoay chiều u = 141cos(100πt)V, dung kháng của tụ điện là
Α. 50 Ω.
Β. 0,01 Ω.
C. 12 Ω.
D. 100 Ω.
Đặt vào hai đầu cuộn cảm \({\rm{L}} = \frac{1}{\pi }{\rm{H}}\) một điện áp xoay chiều u = u = 141cos(100πt)V, cảm kháng của cuộn cảm là
A. 200 Ω.
B. 100 Ω.
C. 50 Ω.
D. 25 Ω.
Tín hiệu tương tự thường được biểu diễn thông qua
A. biên độ.
B. điện áp.
C. công suất.
D. nhiệt độ.
Biên độ của tín hiệu tương tự
A. biến đổi liên tục theo thời gian.
B. không đổi theo thời gian.
C. chỉ nhận hai giá trị cao và thấp.
D. nhận ba giá trị thấp, trung bình, cao.
Tín hiệu tương tự có dạng hình sin là tín hiệu được
A. tuần hoàn, lặp lại sau mỗi chu kì.
B. ổn định sau mỗi chu kì.
C. không tuần hoàn, biến đổi theo thời gian.
D. biến đổi theo thời gian.
Trong các dạng tín hiệu được biểu diễn như hình bên dưới, tín hiệu tương tự đượcbiểu diễn ở hình

A. (1) và (2).
B. (2) và (4).
C. (1) và (3).
D. (2) và (3).
Mạch khuếch đại biên độ điện áp là mạch làm biến đổi
A. biên độ tín hiệu lối ra lớn hơn biên độ tín hiệu lối vào.
B. biên độ tín hiệu lối vào lớn hơn biên độ tín hiệu lối ra.
C. biên độ tín hiệu lối ra lớn hơn cường độ tín hiệu lối vào.
D. biên độ tín hiệu lối vào lớn hơn cường độ tín hiệu lối vào.
Tín hiệu có thể bức xạ thành sóng điện từ để truyền đi xa được trong không gian thì cần phải qua mạch
A. khuếch đại tín hiệu.
B. điều chế tín hiệu.
C. giải mã tín hiệu.
D. khuếch đại biên độ.
Tín hiệu tương tự tần số thấp, muốn truyền đi xa trong không gian cần sử dụng
A. sóng âm tần.
B. sóng mang.
C. sóng âm.
D. sóng điện.
Trong điều chế biên độ, biên độ sóng mang
A. thay đổi, chỉ có tần số sóng mang không thay đổi theo tín hiệu cần truyền đi.
B. biến đổi theo tín hiệu cần truyền đi.
C. không thay đổi, chỉ có tần số sóng mang thay đổi theo tín hiệu cần truyền đi.
D. không biến đổi theo tín hiệu cần truyền đi.
Công dụng chính của khuếch đại thuật toán là khuếch đại
A. công suất.
B. chu kì và tần số của tín hiệu điện.
C. dòng điện một chiều.
D. điện áp.
Tín hiệu khuếch đại ở đầu ra ngược pha với tín hiệu đầu vào là tín hiệu được thực hiện từ mạch
A. khuếch đại không đảo.
B. khuếch đại đảo.
C. so sánh.
D. tích phân.
Mạch khuếch đại thuật toán để thực hiện trừ hai tín hiệu điện áp đầu vào là mạch
A. cộng.
B. trừ.
C. so sánh.
D. tích phân.
Mạch khuếch đại thuật toán để thực hiện so sánh điện áp đầu vào với một giá trị điện áp ngưỡng là mạch
A. cộng.
B. trừ.
C. so sánh.
D. tích phân.
Một IC khuếch đại thuật toán được cấu tạo gồm
A. một hoặc nhiều khuếch đại thuật toán.
B. một khuếch đại thuật toán.
C. hai hoặc nhiều khuếch đại thuật toán.
D. nhiều khuếch đại thuật toán.
Sơ đồ mạch điện như hình là sơ đồ nguyên lí của mạch khuếch đại
A. cộng.
B. trừ.
C. so sánh.
D. tích phân.
Trong mạch so sánh, khi điện áp vào ở đầu vào đảo lớn hơn điện áp ngưỡng ở đầu vào không đảo thì
A. Ura ≈ -Ucc
B. Ura ≈ Ucc.
C. Ura < Ucc.
D. Ura > Ucc.
Trong mạch so sánh, khi điện áp vào ở đầu vào đảo nhỏ hơn điện áp ngưỡng ở đầu vào không đảo thì
A. Ura ≈ -Ucc
B. Ura ≈ Ucc.
C. Ura < Ucc.
D. Ura > Ucc.
Trong mạch so sánh, nếu điện áp đầu ra bằng điện áp nguồn dương thì điện áp đầu vào đảo có giá trị
A. nhỏ hơn điện áp ngưỡng ở đầu vào không đảo.
B. bằng điện áp ngưỡng ở đầu vào không đảo.
C. lớn hơn điện áp ngưỡng ở đầu vào không đảo.
D. bằng hiệu điện áp ngưỡng ở đầu vào không đảo.
Trong mạch so sánh, nếu điện áp đầu ra bằng điện áp nguồn âm thì điện áp đầu vào đảo có giá trị
A. lớn hơn điện áp ngưỡng ở đầu vào không đảo.
B. bằng điện áp ngưỡng ở đầu vào không đảo.
C. nhỏ hơn điện áp ngưỡng ở đầu vào không đảo.
D. bằng hiệu điện áp ngưỡng ở đầu vào không đảo.
Trong mạch so sánh, khi điện áp vào ở đầu vào không đảo lớn hơn điện áp ngưỡng ở đầu vào đảo thì
A. Ura ≈ -Ucc
B. Ura ≈ Ucc.
C. Ura < Ucc.
D. Ura > Ucc.
Trong mạch so sánh, khi điện áp vào ở đầu vào không đảo nhỏ hơn điện áp ngưỡng ở đầu vào đảo thì
A. Ura ≈ -Ucc
B. Ura ≈ Ucc.
C. Ura < Ucc.
D. Ura > Ucc.
Trong mạch so sánh, nếu điện áp đầu ra bằng xấp xỉ điện áp nguồn dương thì
A. điện áp đầu vào không đảo có giá trị nhỏ hơn điện áp ngưỡng ở đầu vào không đảo.
B. điện áp đầu vào không đảo có giá trị bằng điện áp ngưỡng ở đầu vào không đảo.
C. điện áp đầu vào không đảo có giá trị lớn hơn điện áp ngưỡng ở đầu vào không đảo.
D. điện áp đầu vào không đảo có giá trị bằng hiệu điện áp ngưỡng ở đầu vào không đảo.
Trong mạch so sánh, nếu điện áp đầu ra bằng xấp xỉ điện áp nguồn âm thì
A. điện áp đầu vào không đảo có giá trị lớn hơn điện áp ngưỡng ở đầu vào không đảo.
B. điện áp đầu vào không đảo có giá trị bằng điện áp ngưỡng ở đầu vào không đảo.
C. điện áp đầu vào không đảo có giá trị nhỏ hơn điện áp ngưỡng ở đầu vào không đảo.
D. điện áp đầu vào không đảo có giá trị bằng hiệu điện áp ngưỡng ở đầu vào không đảo.
Hệ số khuếch đại điện áp của bộ khuếch đại thuật toán là đại lượng đặc trưng cho khả năng
A. khuếch đại điện áp đầu vào.
B. khuếch đại điện áp đầu ra.
C. biến điệu điện áp đầu vào.
D. biến điệu điện áp đầu ra.
Tín hiệu điện áp do microphone tạo ra là tín hiệu
A. điện từ.
B. tương tự.
C. số.
D. tuần hoàn.
Tín hiệu được truyền trên đường dây cáp đồng nối điện thoại cố định với tổng đài là tín hiệu
A. điện từ.
B. tương tự.
C. số.
D. tuần hoàn.
Sóng vô tuyến tần số cao có “mang theo” các tín hiệu âm tần được gọi là
A. tần số.
B. sóng mang.
C. sóng âm.
D. sóng điện.
Cho dạng tín hiệu đầu vào và đầu ra như hình bên dưới.
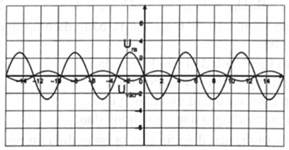
Tín hiệu đầu ra của hình bên được xử lí bởi mạch
A. khuếch đại không đảo.
B. khuếch đại đảo.
C. so sánh.
D. tích phân.
Tín hiệu có thể bức xạ thành sóng điện từ và lan truyền trong không gian là tín hiệu
A. tương tự.
B. cao tần.
C. so sánh.
D. tuần hoàn.
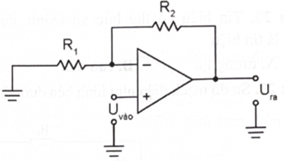
Sơ đồ mạch điện như hình bên dưới đang mô tả mạch khuếch đại thuật toán
A. cộng không đảo.
B. trừ.
C. cộng đảo.
D. tích phân.
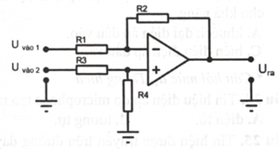
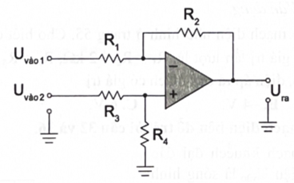
Biểu thức điện áp đầu ra của mạch khuếch đại thuật toán có sơ đồ mạch điện như hình là:
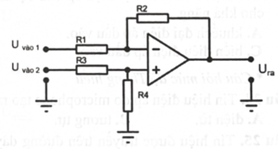
A. \({{\rm{U}}_{{\rm{ra}}}} = \left( {\frac{{{{\rm{R}}_4}}}{{{{\rm{R}}_3} + {{\rm{R}}_4}}}} \right)\left( {1 + \frac{{{{\rm{R}}_2}}}{{{{\rm{R}}_1}}}} \right){{\rm{U}}_{{\rm{v\`a o }}2}} - \frac{{{{\rm{R}}_2}}}{{{{\rm{R}}_1}}}{{\rm{U}}_{{\rm{v\`a o }}1}}\)
B. \({U_{ra}} = \left( {\frac{{{R_4}}}{{{R_3} + {R_4}}}} \right)\left( {1 + \frac{{{R_2}}}{{{R_1}}}} \right){U_{{\rm{v\`a o l }}}} - \frac{{{R_2}}}{{{R_1}}}{U_{{\rm{v\`a o2 }}}}\)
C. \({{\rm{U}}_{{\rm{ra}}}} = \left( {\frac{{{{\rm{R}}_4}}}{{{{\rm{R}}_3}}} + {{\rm{R}}_4}} \right)\left( {1 + \frac{{{{\rm{R}}_2}}}{{{{\rm{R}}_1}}}} \right){{\rm{U}}_{{\rm{v\`a }}2}} - \frac{{{{\rm{R}}_2}}}{{{{\rm{R}}_1}}}{{\rm{U}}_{{\rm{v\`a o }}2}}\)
D. \({U_{ra}} = \left( {\frac{{{R_4}}}{{{R_3}}} + {R_4}} \right)\left( {1 + \frac{{{R_2}}}{{{R_1}}}} \right){U_{{\rm{v\`a o l }}}} - \frac{{{R_2}}}{{{R_1}}}{U_{{\rm{v\`a o l }}}}\)
Sử dụng sơ đồ mạch điện như hình .
Cho biết các điện trở và điện áp vào trong mạch có giá trị lần lượt là: R1 = R2 = 2 kΩ, R3 = R4 = 10 kΩ; Uvào 1 = 1 V, Uvào 2 = 5 V. Khi đó, điện áp ra của mạch có giá trị
A. 19 V.
B. -4 V.
C. 6 V.
D. 4 V.
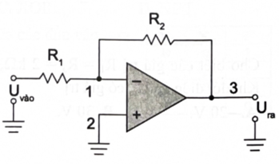
Trong một mạch khuếch đại đảo như hình vẽ, tín hiệu Uvào là sóng hình sin có biên độ 4 V, R2= 1kΩ vàR1 = 200 Ω.
Điện áp ở đầu ra có giá trị
A. -20 V.
B. 0,02 V.
C. 800 V.
D. 0,8 V.
Trong một mạch khuếch đại không đảo, tín hiệu Uvào là sóng hình sin có biên độ 4 V, R2 = 500 Ω và R1 = 200 Ω. Điện áp ở đầu ra có giá trị
A. 14 V.
B. 5,6 V.
C. 1,6 V.
D. 10 V.
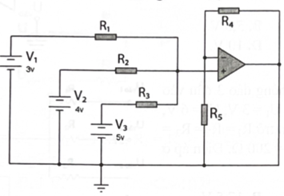
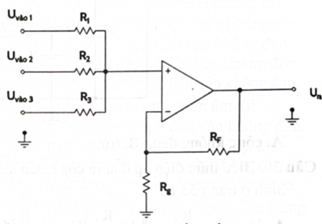
Mạch cộng không đảo 3 đầu vào có các điện áp vào U1 = 3 V, U2=6 V, U3=2 V. Các điện trở R1 = R2 =R3 = 100 Ω và Rf= Rg= 200 Ω. Điện áp ở đầu ra có giá trị
A. \(\frac{{22}}{3}\;{\rm{V}}.\)
B. \(17,5\;{\rm{V}}.\)
C. \(8,5\;{\rm{V}}.\)
D. \(\frac{{11}}{3}\;{\rm{V}}.\)
Một mạch so sánh đảo dùng khuếch đại thuật toán có nguồn cấp là +9 V và –9 V. Nếu đặt điện áp ngưỡng ở đầu không đảo là 2 V, điện áp vào ở đầu vào có giá trị là 1 V. Điện áp ra có giá trị là
A. +9 V.
B. -9 V.
C. +2 V.
D. -2 V.
Sử dụng mạch khuếch đại đảo như hình.
Cho biết R1 = 1 k Ω, R2 = 10 k Ω . Hệ số khuếch đại của mạch là
A. 10.
B. 1.
C. -10.
D. -1.
Cho mạch trừ như hình sau.
Cho biết các giá trị R1 = R3 = 2 kΩ, R2 = R4 =10 kΩ, Uvào 1 = 1 V, Uvào 2 = 5 V.Khi đó, điện áp Ura có giá trị
A. -20 V.
B. 30 V.
C. 32,2 V.
D. -17,8 V.
Cho mạch cộng không đảo như hình vẽ.
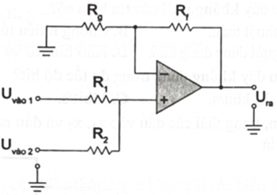
Cho biết các giá trị R1 = R2 = 1 kΩ, Rf = Rg= 10 kΩ, Uvào 1 = 1 V, Uvào 2 = 5 V.Khi đó, điện áp Ura cógiá trị
A. 10 V.
B. 1 V.
C.-10 V.
D.-1 V.
Tín hiệu số là
A. tín hiệu điện có biên độ biến thiên liên tục theo thời gian.
B. chuỗi các tín hiệu rời rạc, có biên độ biến đổi theo thời gian.
C. chuỗi các tín hiệu rời rạc, có biên độ không đổi trong một khoảng thời gian.
D. tín hiệu điện có biên độ và tần số không đổi theo thời gian.
Loại tín hiệu nào sau đây là tín hiệu số?
A. Tín hiệu âm thanh phát ra từ loa máy tính.
B. Tín hiệu âm thanh được lưu trên bộ nhớ máy tính.
C. Tín hiệu âm thanh lan truyền trong không khí.
D. Tín hiệu âm thanh phát ra từ điện thoại thông minh.
Bảng mô tả mối liên hệ logic giữa đầu vào và đầu ra gọi là
A. bảng logic.
B. bảng điều khiển.
C. bảng chân lí.
D. bảng biến thiên.
Cổng logic có một đầu vào và cho trạng thái logic ở đầu ra đảo ngược với trạng thái logic của đầu vào là cổng
A. AND.
B. OR.
C. XOR.
D. NOT.
Bảng chân lí sau mô tả liên hệ logic giữa các đầu vào – racủa cổng logic
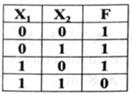
A. AND.
B. OR.
C. NOT.
D. NAND.
Đặc điểm nào sau đây không phải của tín hiệu số?
A. Có thể nén bằng thuật toán.
B. Chống nhiễu tốt.
C. Cho phép nhiều người dùng đồng thời.
D. Khó lưu trữ và xử lí.
Đơn vị đo nào sau đây không dùng trong đo tốc độ bit?
A. bit/s.
B. kbit/s.
C. Mbit/s.
D. m/s.
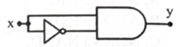
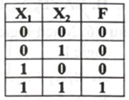
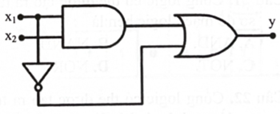
Tại một thời điểm, trạng thái các đầu vào x1, x2 và đầu ra y như hình vẽ dưới đây. Cổng logic phù hợp là
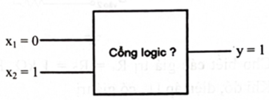
A. AND.
B. OR.
C. NOR.
D. NOT.
Trong số các mạch logic sau, mạch nào không phải là mạch tổ hợp?
A. Mạch cộng số học.
B. Mạch so sánh hai số nhị phân 1 bit.
C. Mạch giải mã BCD sang thập phân.
D. Mạch đếm sự kiện hoặc biến cố.
Mạch logic nào sau đây không phải là mạch dãy (mạch tuần tự)?
A. Mạch ghi dịch.
B. Mạch đếm.
C. Mạch chia tần.
D. Mạch nhân số học.
Trên hai đường truyền tín hiệu số A và B. Đường truyền A có Tb = 125 ms, đường truyền B có Tb = 62,5 ms. Biểu thức đúng khi so sánh tốc độ bit của hai đường truyền là
A. RA = RB.
B. RA < RB.
C. RA > RB.
D. RA = 2RB.
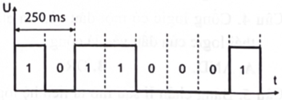
Tốc bộ bit của tín hiệu số được biểu diễn theo giản đồ hình bên là
A. 8 bit/s.
B. 16 bit/s.
C. 32 bit/s.
D. 64 bit/s.
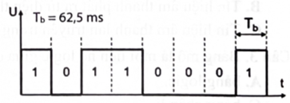
Tốc bộ bit của tín hiệu số được biểu diễn theo giản đồ hình bên là
A. 8 bit/s.
B. 16 bit/s.
C. 32 bit/s.
D. 64 bit/s.
Tốc bộ bit của tín hiệu số được biểu diễn theo giản đồ hình bên là
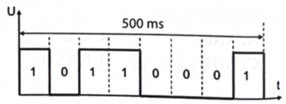
A. 8 bit/s.
B. 16 bit/s.
C. 32 bit/s.
D. 64 bit/s.
Giá trị của biểu thức logic khác với các biểu thức còn lại là mode
A. \(x + 1.\)
B. \(x + \bar x.\)
C. \(x.\bar x.\)
D. \(1 + \bar x.\)
Mạch logic như hình bên đang biểu diễn chobiểu thức logic
A. \(x + 1.\)
B. \(x + \bar x.\)
C. \(x.\bar x.\)
D. \(1 + \bar x.\)
Cho x = 1, giá trị của biểu thức logic khác với các biểu thức còn lại là
A. \(x + x.\)
B. x.1.
C. \(x.\bar x.\)
D. \(x + \bar x.\)
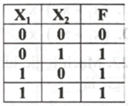
Bảng chân lí bên mô tả liên hệ logic giữa các đầu vào – racủa cổng logic
A. AND.
B.OR.
C. NOT.
D. NAND.
Bảng chân lí bên mô tả liên hệ logic giữa các đầu vào – ra của cổng logic
A. AND.
B.OR.
C. NOT.
D. NAND.
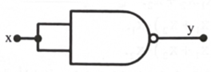
Cổng logic có thể được tạo ra từ sơ đồ mạch logic sau là
A. AND.
B.OR.
C. NOT.
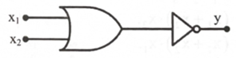
D. NOR.
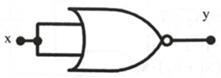
Cổng logic có thể được tạo ra từ sơ đồ mạch logic bên là
A. AND.
B. NAND.
C. NOT.
D. NOR.
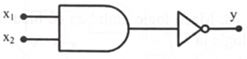
Cổng logic có thể được tạo ra từsơ đồ mạch logic bên là
A. AND.
B. NAND.
C. NOT.
D. NOR.
Cổng logic có thể được tạo ratừ sơ đồ mạch logic bên là
A. AND.
B. NAND.
C. NOT.
D. NOR.
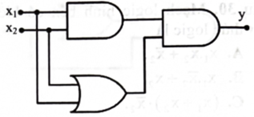
Mạch logic biểu diễn bởi sơ đồ bên sử dụng các cổng logic

A. AND và OR.
B. AND và NOT.
C. NOR và NAND.
D. AND và NOR.
Mạch logic bên sử dụng cáccổng logic
A. NOT, NAND và NOR.
B. NOT, AND và OR.
C. AND, NAND và NOR.
D. NAND, NOR và OR.
Mạch logic hình bên có biểu thứclogic là

A. \({x_1} \cdot {\bar x_2} + {x_2}.\)
B. \({x_1} \cdot {\bar x_2} \cdot {x_2}.\)
C. \(\left( {{x_1} + {x_2}} \right) \cdot {x_2}.\)
D. \(\left( {{x_1} + {x_2}} \right) \cdot {x_1}.\)
Mạch logic hình bên có biểu thứclogic là
A. \({x_1} \cdot {x_2} + {\bar x_3}.\)
B. \({x_1} \cdot {\bar x_2} \cdot {x_3}.\)
C. \(\left( {{x_1} + {x_2}} \right) \cdot {x_3}.\)
D. \(\left( {{x_1} + {x_2}} \right) \cdot {x_1}.\)
Mạch logic hình bên có biểu thức logic là
A. \({x_1} \cdot {x_2} + {\bar x_2}.\)
B. \({x_1} \cdot {\bar x_2} + {x_2}.\)
C. \(\left( {{x_1} + {x_2}} \right) \cdot {x_1}.\)
D. \(\left( {{x_1} + {x_2}} \right) \cdot {x_2}.\)
Mạch logic hình bên có biểu thức logic là
A. \({x_1} \cdot {x_2} + {\bar x_1}.\)
B. \({x_1} \cdot {\bar x_2} + {x_2}.\)
C. \(\left( {{x_1} + {x_2}} \right) \cdot {x_1}.\)
D. \(\overline {\left( {{x_1} \cdot {x_2}} \right)} + {x_1}.\)
Mạch logic hình bên có biểu thức logic là
A. \({x_1} \cdot {x_2} + {\bar x_2}.\)
B. \({x_1} \cdot {\bar x_2} + {x_2}.\)
C. \(\left( {{x_1} + {x_2}} \right) \cdot {\bar x_2}.\)
D. \(\overline {\left( {{x_1} \cdot {x_2}} \right)} + {x_1}.\)
Mạch logic hình bên có biểu thức logic là
A. \({{\rm{x}}_1} \cdot {{\rm{x}}_2} + {\bar x_2}.\)
B. \(\left( {{x_1} \cdot {x_2}} \right) + \left( {{{\bar x}_1} + {{\bar x}_2}} \right).\)
C. \(\left( {{x_1} + {x_2}} \right) \cdot {\bar x_2}.\)
D. \(\overline {\left( {{x_1} \cdot {x_2}} \right)} + {x_1} \cdot .\)
Mạch logic hình bên có biểu thứclogic là
A. \({x_1} \cdot {x_2} + {\bar x_2}.\)
B. \(\left( {{{\rm{x}}_1} \cdot {{\rm{x}}_2}} \right) + \left( {{{\overline {\rm{x}} }_1} + {{\bar x}_2}} \right).\)
C. \(\left( {{x_1} + {x_2}} \right) + {\bar x_1} \cdot {\bar x_2}.\)
D. \(\overline {\left( {{x_1} \cdot {x_2}} \right)} + {x_1}.\)
Mạch logic hình bên có biểu thứclogic là
A. \({x_1} \cdot {x_2} + {\bar x_2}.\)
B. \(\left( {{x_1} \cdot {x_2}} \right) + \left( {{{\bar x}_1} + {{\bar x}_2}} \right).\)
C. \(\left( {{x_1} + {x_2}} \right) + {\bar x_2} \cdot {\bar x_2}.\)
D. \({{\rm{x}}_1} \cdot {{\rm{x}}_2} + {\bar x_1} \cdot {\bar x_2}.\)
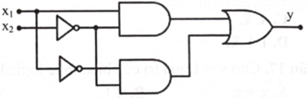
Mạch logic hình bên có biểu thứclogic là
A. \({{\rm{x}}_1} \cdot {{\rm{x}}_2} + {\bar x_1} \cdot {{\rm{x}}_2}.\)
B. \(\left( {{x_1} \cdot {x_2}} \right) + \left( {{{\bar x}_1} + {{\bar x}_2}} \right).\)
C. \(\left( {{x_1} + {x_2}} \right) + {\bar x_2} \cdot {\bar x_2}.\)
D. \({{\rm{x}}_1} \cdot {{\rm{x}}_2} + {\overline {\rm{x}} _1} \cdot {\overline {\rm{x}} _2}.\)
Mạch logic hình bên có biểu thức logic là
A. \(\left( {{{\rm{x}}_1} \cdot {{\rm{x}}_2}} \right) \cdot \left( {{{\rm{x}}_1} + {{\rm{x}}_2}} \right).\)
B. \(\left( {{x_1} \cdot {x_2}} \right) + \left( {{{\bar x}_1} + {{\bar x}_2}} \right).\)
C. \(\left( {{x_1} + {x_2}} \right) + {\bar x_2} \cdot {\bar x_2}.\)
D. \({x_1} \cdot {x_2} + {\bar x_1} \cdot {\bar x_2}.\)
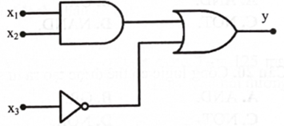
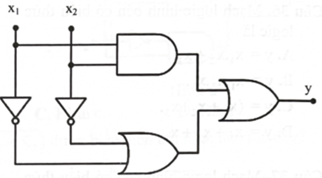
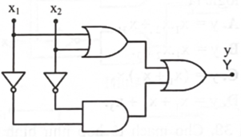
Mạch logic hình bên có biểu thứclogic là
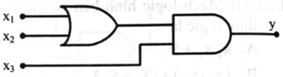
A. \(y = {x_1} \cdot {x_2} + {x_3}.\)
B. \(y = {x_1} \cdot {x_2} \cdot {x_3}.\)
C. \(y = \left( {{x_1} + {x_2}} \right) \cdot {x_3}.\)
D. \(y = {x_1} + {x_2} + {x_3}.\)
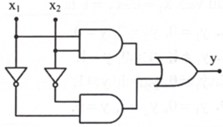
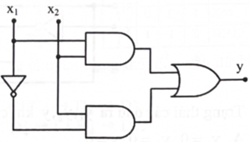
Mạch logic hình bên có biểu thứclogic là

A. \(y = {x_1} \cdot {x_2} + {x_3}.\)
B. \(y = {x_1} \cdot {x_2} \cdot {x_3}.\)
C. \(y = \left( {{x_1} + {x_2}} \right) \cdot {x_3}.\)
D. \(y = {x_1} + {x_2} + {x_3}.\)
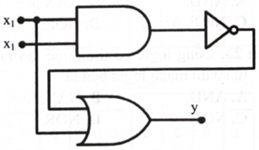
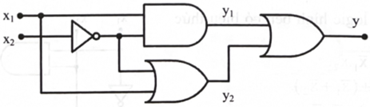
Cho mạch tổ hợp như hình bên. Trạng thái các đầu ra y1,y2,y khi cácđầu vào x1 =0, x2 =1 là
A. \({{\rm{y}}_1} = 0,{{\rm{y}}_2} = 0,{\rm{y}} = 0.\)
B. \({{\rm{y}}_1} = 1,{{\rm{y}}_2} = 0,{\rm{y}} = 1.\)
C. \({{\rm{y}}_1} = 0,{{\rm{y}}_2} = 1,{\rm{y}} = 1.\)
D. \({{\rm{y}}_1} = 0,{{\rm{y}}_2} = 1,{\rm{y}} = 0.\)
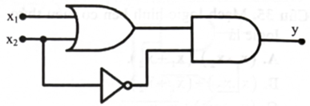
Cho mạch tổ hợp như hình bên dưới.
Trạng thái các đầu ra y1,y2,y khi cácđầu vào x1 = 1, x2 = 0là
A. \({{\rm{y}}_1} = 0,{{\rm{y}}_2} = 0,{\rm{y}} = 0.\)
B. \({{\rm{y}}_1} = 0,{{\rm{y}}_2} = 0,{\rm{y}} = 1.\)
C. \({y_1} = 0,{y_2} = 1,y = 0.\)
D. \({{\rm{y}}_1} = 1,{{\rm{y}}_2} = 1,{\rm{y}} = 1.\)
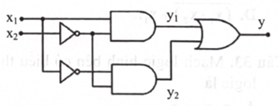
Mạch logic của biểu thức \(y = {\bar x_1} \cdot {x_2} + {x_1} \cdot {\bar x_2}\)có mạch logic như hình nào sau đây?
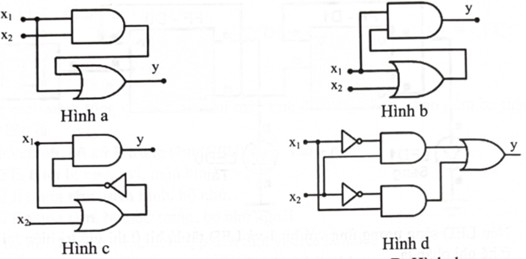
A. Hình a.
B. Hình b.
C. Hình c.
D. Hình d.
Sơ đồ của hàm logic \(y = {x_1} \cdot {x_2} \cdot \left( {\overline {{x_1} + {{\bar x}_3}} } \right)\) được biểu diễn bởi hình nào sau đây?
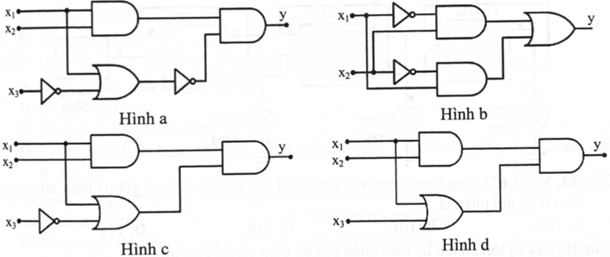
A. Hình a.
B. Hình b.
C. Hình c.
D. Hình d.
Trạng thái đầu vào dữ liệu và xung điều khiển của FF-D như hình bên dưới.

Hiện tại đèn LED đang sáng (Q = 1). Trình tự chuyển trạng thái đầu vào dữ liệu và xung điều khiển để tắt đèn LED là
A. CLK↓ → D↓ → CLK↑.
B. CLK↓ → D↓ → D↑.
C. D↓ → D → CLK↓.
D. D↓ → CLK↓ → D↑.
Cho sơ đồ bộ đếm như hình bên dưới.
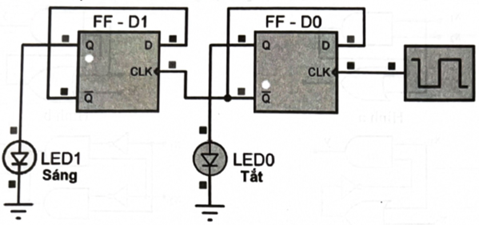
Nếu LED sáng tương ứng với bit 1 và LED tắt là bit 0 thì giá trị hiện tại của bộ đếm ở hệ nhị phân là
A. 10.
B. 01.
C. 00.
D. 11.
Nếu LED sáng tương ứng với bit 1 và LED tắt là bit 0 thì giá trị hiện tại của bộ đểm ở hệ nhị phân là
A. 100.
B. 101.
C. 110.
D. 111.
Giá trị lớn nhất ở hệ thập phân của bộ đếm có thể đạt được là
A. 1.
B. 3.
C. 5.
D. 7.
Trạng thái đầu vào dữ liệu và xung điều khiển của FF-D như hình bên dưới.
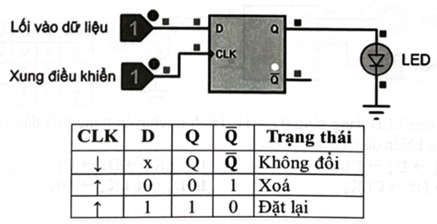
Hiện tại đèn LED đang tắt (Q = 0). Trình tự chuyển trạng thái đầu vào dữ liệu và xung điều khiển để bật đèn LED là
A. CLK↓ → D↓.
B. D↓ → D↑.
C. D↓ → CLK↓.
D. CLK↓ → CLK↑.
Theo cách nhìn tổng quan nhất, mỗi máy tính đa năng thường bao gồm ba thành phần cơ bản là
A. bộ nhớ chính, bộ xử lí trung tâm (CPU), khối vào - ra.
B. bộ xử lí, thiết bị ngoại vi, màn hình.
C. bộ xử lí trung tâm, màn hình, bộ nhớ.
D. bộ xử lí trung tâm, bộ nhớ trong, bộ nhớ ngoài.
Loại bộ nhớ không được tích hợp trên một vi điều khiển là
A. bộ nhớ RAM.
B. bộ nhớ ROM.
C. bộ nhớ EEPROM.
D. thẻ đục lỗ.
Loại bộ nhớ không được tích hợp trên một vi điều khiển là
A. bộ nhớ SRAM.
B. bộ nhớ FLASH.
C. bộ nhớ EEPROM.
D. Ổ cứng SSD.
Đặc điểm nào sau đây không phải của vi điều khiển?
A. Là một máy tính chuyên dụng.
B. Có thể lập trình.
C. Là một vi mạch tích hợp.
D. Thiếu tính linh hoạt khi giải quyết các bài toán điều khiển phức tạp so với các IC logic.
Chức năng nào sau đây không phải của vi điều khiển?
A. Xử lí dữ liệu.
B. Lưu trữ dữ liệu.
C. Di chuyển dữ liệu.
D. In dữ liệu giấy.
Một thiết bị điện tử trong gia đình có thể cập nhật chương trình điều khiển, vậy thiết bị đó đã sử dụng mạch điện điều khiển nào sau đây?
A. Mạch điện chỉ sử dụng các cổng logic cơ bản.
B. Mạch điện chỉ sử dụng các IC chức năng cơ bản.
C. Mạch điện có sử dụng vi điều khiển.
D. Mạch điện chỉ sử dụng các IC logic cơ bản.
Theo cấu trúc các khối chức năng, vi điều khiển thường bao gồm ba khối chức năng cơ bản là:
A. bộ xử lí trung tâm, bộ nhớ, thiết bị ngoại vi.
B. bộ xử lí trung tâm, bộ nhớ, bộ xử lí số học và logic.
C. bộ xử lí trung tâm, bộ nhớ, khối vào - ra (I/O).
D. bộ xử lí trung tâm, bộ xử lí số học và logic, khối vào - ra (I/O).
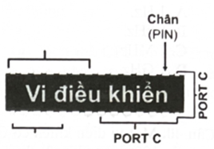
Theo sơ đồ khối chức năng của vi điều khiển cho bởi hình bên, chức năng điều khiển, tính toán số học và logic là nhiệm vụ của
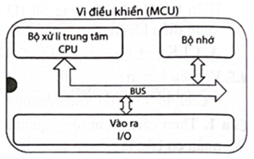
A. bộ xử lí trung tâm.
B. bộ nhớ.
C. khối vào ra (I/O).
D. bus hệ thống.
Trong vi điều khiển, các thao tác tính toán số học (cộng, trừ, nhân, chia,...) và logic (AND, OR, NOT,...) được thực hiện bởi
A. bộ xử lí trung tâm.
B. bộ nhớ.
C. khối vào ra (I/O).
D. bộ nhớ RAM.
Trong vi điều khiển, khi CPU cần trao đổi dữ liệu hoặc điều khiển các thiết bị bên ngoài, quá trình này được thực hiện thông qua
A. bộ xử lí trung tâm.
B. bộ nhớ.
C. bus hệ thống.
D. khối vào ra (I/O).
Chương trình điều khiển (tập hợp các câu lệnh và dữ liệu) được lưu trữ trong
A. bộ xử lí trung tâm.
B. bộ nhớ.
C. khối vào ra (I/O).
D. bus hệ thống.
Trong vi điều khiển, để dữ liệu không bị biến mất khi ngắt nguồn điện, dữ liệu đó sẽ được lưu trữ trên
A. bộ nhớ truy cập ngẫu nhiên (RAM).
B. bộ nhớ EEPROM.
C. bộ nhớ truy cập ngẫu nhiên tĩnh (SRAM).
D. thanh ghi.
Trong vi điều khiển, khi cần đọc dữ liệu từ bộ nhớ, CPU định vị dữ liệu qua
A. dung lượng của bộ nhớ.
B. địa chỉ bộ nhớ.
C. xung nhịp của hệ thống.
D. bus dữ liệu.
Trong vi điều khiển, để ghi dữ liệu vào bộ nhớ, CPU định vị trí cần ghi qua
A. dung lượng của bộ nhớ.
B. độ lớn dữ liệu.
C. nội dung toán hạng.
D. địa chỉ bộ nhớ.
Để đọc dữ liệu từ cổng I/O, CPU định vị cổng I/O qua
A. địa chỉ cổng I/O.
B. địa chỉ bộ nhớ.
C. xung nhịp của hệ thống.
D. bus dữ liệu.
Để ghi dữ liệu ra cổng I/O, CPU cần định vị cổng I/O qua
A. địa chỉ cổng I/O.
B. địa chỉ bộ nhớ.
C. xung nhịp của hệ thống.
D. bus dữ liệu.
Tần số xung nhịp tác động thế nào tới tốc độ xử lí của CPU?
A. Tần số xung nhịp càng cao, thì tốc độ xử lí của CPU càng nhanh.
B. Tần số xung nhịp không liên quan đến tốc độ xử lí của CPU.
C. Tần số xung nhịp càng cao, tốc độ xử lí của CPU càng chậm.
D. Chu kì xung nhịp càng lớn, tốc độ xử lí của CPU càng nhanh.
Hầu hết các cổng I/O trên vi điều khiển đều khả trình (trạng thái vào – ra của cổng I/O lập trình được). Nếu một cổng I/O dùng để điều khiển đèn LED thì cần lập trình thiết lập trạng thái cổng I/O đó là
A. cổng vào.
B. cổng ra.
C. cổng logic.
D. cổng vào và ra.
Một cảm biến nhiệt độ đầu ra tương tự được kết nối với cổng I/O của vi điều khiển. Để đọc tín hiệu của cảm biến này thì cần lập trình xác lập trạng thái cổng I/O là
A. cổng vào.
B. cổng ra.
C. cổng logic.
D. cổng vào và ra.
Trong vi điều khiển, tập hợp các dây dẫn vật lí chuyên dùng để vận chuyển dữ liệu giữa các khối chức năng của vi điều khiển còn được gọi là
A. bus địa chỉ.
B. bus điều khiển.
C. bus đồng bộ.
D. bus dữ liệu.
Trong vi điều khiển, tập hợp các dây dẫn vật lí chuyên dùng để vận chuyển tín hiệu xác định địa chỉ bộ nhớ hay cổng I/O mà CPU muốn truy cập còn được gọi là
A. bus địa chỉ.
B. bus điều khiển.
C. bus đồng bộ.
D. bus dữ liệu.
Chương trình (các câu lệnh và dữ liệu) được nạp vào bộ nhớ của vi điều khiển thông qua
A. khối dao động.
B. khối nguồn.
C. khối hiển thị.
D. khối truyền thông.
Các khối chức năng của vi điều khiển được đóng gói trên một chip. Vì vậy, để vi điều khiển hoạt động, cần thiết phải có một mạch điện hỗ trợ bên ngoài. Mạch điện này thường được gọi là
A. bo mạch lập trình.
B. thiết bị ngoại vi.
C. bo mạch cảm biến.
D. bộ nhớ ngoài.
Khối chức năng có nhiệm vụ cung cấp nguồn điện phù hợp cho sự hoạt động của vi điều khiển cùng các thành phần còn lại của bo mạch lập trình còn được gọi là
A. khối chỉnh lưu.
B. khối ổn áp.
C. khối nguồn.
D. khối dao động.
Trên bo mạch lập trình vi điều khiển, khối chức năng có nhiệm vụ cấp nguồn cho vi điều khiển hoạt động ở điện áp 3,3 V hoặc 5 V một chiều (DC) là
A. khối dao động.
B. khối truyền thông.
C. khối VO.
D. khối nguồn.
Khối chức năng có nhiệm vụ hỗ trợ kết nối và trao đổi dữ liệu giữa vi điều khiển và máy tính cá nhân trên bo mạch lập trình là
A. khối dao động.
B. khối truyền thông.
C. khối I/O.
D. khối nguồn
Quá trình trao đổi dữ liệu giữa máy tính và vi điều khiển được thực hiện thông qua một khối chuyển đổi tín hiệu trung gian như hình bên. Trên bo mạch lập trình vi điều khiển, khối chức năng này còn được gọi là
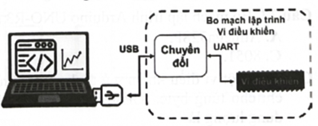
A. khối dao động.
B. khối I/O.
C. khối nguồn.
D. khối truyền thông.
Trên bo mạch lập trình vi điều khiển, chuỗi xung điện dao động tuần hoàn cần thiết cho sự hoạt động của vi điều khiển được tạo ra bởi
A. khối dao động.
B. khối truyền thông.
C. khối I/O.
D. khối nguồn.
Mỗi loại vi điều khiển có một tập hợp xác định các lệnh mà CPU có thể thực hiện (còn gọi là tập lệnh máy). Để diễn giải các lệnh máy phức tạp này, khi viết chương trình cho vi điều khiển, người ta thường sử dụng loại ngôn ngữ lập trình nào sau đây?
A. Ngôn ngữ máy.
B. Ngôn ngữ hợp ngữ.
C. Ngôn ngữ lập trình bậc cao.
D. Ngôn ngữ lập trình bậc thấp.
Chương trình máy tính có nhiệm vụ chuyển các câu lệnh bậc cao sang lệnh máy được gọi là
A. trình điều khiển.
B. trình quản lí ngắt.
C. trình biên dịch.
D. trình gỡ lỗi.
Một chương trình được lưu trữ trên bộ nhớ của vi điều khiển nhằm hỗ trợ quá trình khởi động và tải chương trình điều khiển đã được biên dịch trên máy tính vào bộ nhớ của vi điều khiển có tên gọi là
A. trình tải khởi động (BootLoader).
B. trình biên dịch.
C. trình gỡ lỗi.
D. trình quản lí ngắt.
Một công cụ hỗ trợ quá trình soạn thảo chương trình, gỡ lỗi, biên dịch lệnh máy, tải chương trình điều khiển vào bộ nhớ điều khiển được gọi là
A. ngôn ngữ lập trình bậc cao.
B. trình biên dịch.
C. trình gỡ lỗi (Debugging).
D. môi trường phát triển tích hợp (IDE).
Arduino là nền tảng phát triển các giải pháp lập trình vi điều khiển rất phổ biến hiện nay. IDE của Arduino có tên gọi là
A. Java.
B. Arduino IDE.
C. C, C++.
D. Eclipse
Arduino IDE hỗ trợ ngôn ngữ lập trình
A. Java.
B. Android.
C. C, C++.
D. Eclipse.
Theo cách phân loại dựa trên họ vi điều khiển, Atmega328P là vi điều khiển thuộc họ
A. PIC.
B. AVR.
C. 8051.
D. ARM.
Theo cách phân loại dựa trên độ rộng dữ liệu xử lí, vi điều khiển ATmega328P thuộc loại
A. vi điều khiển 4-bit.
B. vi điều khiển 6-bit.
C. vi điều khiển 8-bit.
D. vi điều khiển 16-bit.
Bo mạch lập trình Arduino UNO-R3 sử dụng loại vi điều khiển
A. Atmega328P.
B. PIC16F877A.
C. 8051.
D. intel core i7-8700.
Một vi điều khiển giả định có số đường dây địa chỉ là 8, bộ nhớ được đánh địa chỉ cho từng byte. Không gian bộ nhớ tối đa mà CPU có thể truy cập trực tiếp có dung lượng là
A. 64 bytes.
B. 128 bytes.
C. 256 bytes.
D. 512 bytes.
Xung nhịp hoạt động trên CPU của một vi điều khiển có giản đồ thời gian như hình dưới đây. Tần số xung nhịp hoạt động của CPU đó là
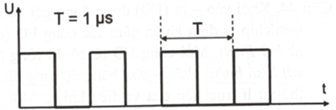
A. 1 Hz.
B. 1 kHz.
C. 1 MHz.
D. 1 GHz.
Một vi điều khiển có CPU hoạt động ở xung nhịp tần số 1 MHz. Biết rằng CPU cần 100 xung nhịp để thực hiện một câu lệnh, thời gian cần thiết để CPU hoàn thành một câu lệnh là
A. 10-6 s.
B. 10-5 s.
C. 10-4 s.
D. 10-3 s.
Một vi điều khiển có CPU hoạt động ở xung nhịp tần số 1 MHz. Biết rằng, cần 10-4s để CPU hoàn thành 1 câu lệnh. Số chu kì xung nhịp cần thiết để CPU đó hoàn thành 1 câu lệnh là
A. 10.
B. 100.
C. 1000.
D. 10000.
Hai vi điều khiển A, B cùng thực hiện một câu lệnh, trong đó: CPU A hoạt động ở tần số xung nhịp 8 MHz và cần 100 chu kì xung nhịp; CPU B hoạt động ở tần số xung nhịp 4 MHz và cần 50 chu kì xung nhịp. Khi so sánh tốc độ xử lí của hai vi điều khiển thì nhận định nào sau đây là đúng?
A. Hai vi điều khiển có tốc độ bằng nhau.
B. Vi điều khiển A nhanh hơn vi điều khiển B.
C. Vi điều khiển A chậm hơn vi điều khiển B.
D. Vi điều khiển A nhanh gấp đôi vi điều khiển B.
Hai vi điều khiển A, B cùng thực hiện một câu lệnh và số chu kì xung nhịp thực hiện lệnh là như nhau.
Giả sử rằng xung nhịp hoạt động của các CPU có giản đồ xung như hình bên dưới.
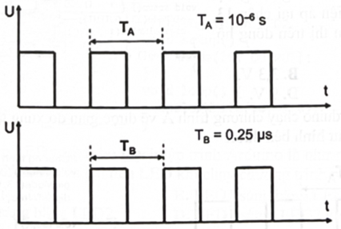
Khi so sánh tốc độ xử lí của hai vi điều khiển thì nhận định nào sau đây là đúng?
A. Hai vi điều khiển có tốc độ bằng nhau.
B. Vi điều khiển B nhanh gấp 4 lần vi điều khiển A.
C. Vi điều khiển A nhanh hơn vi điều khiển B.
D. Vi điều khiển A nhanh gấp 4 lần vi điều khiển B.
Khối vào – ra (I/O) được đóng gói và ra chân trên chip vi điều khiển gồm các cổng I/O (còn gọi là I/O Port). Mỗi cổng I/O sẽ có độ rộng (số dây vật li/số bit/số chân – pin) bằng độ rộng dữ liệu có thể xử lí trực tiếp của vi điều khiển. Một vi điều khiển 8-bit sẽ cho số lượng đường truyền/cổng là
A. 4-bit.
B. 8-bit.
C. 16-bit.
D. 32-bit.
Trên bo mạch lập trình Arduino UNO, ngoài chức năng vào ra số thì các chân A0 → A5 còn có chức năng chuyên biệt nào sau đây?
A. Chân dao động.
B. Chân nguồn điện.
C. Chân đầu vào tín hiệu tương tự.
D. Chân Reset.
Trên các phiên bản của bo mạch lập trình Arduino, chân kĩ thuật số luôn được kết nối với một mạch điện điều khiển đèn LED là
A. 3.
B. 9.
C. 10.
D. 13.
Chương trình sau làm cho chân 13 của bo mạch lập trình Arduino có mức logic là LOW (mức thấp). Nếu dùng đồng bộ vạn năng đo điện áp tại chân 13 thì điện áp hiển thị trên đồng hồ xấp xỉ là
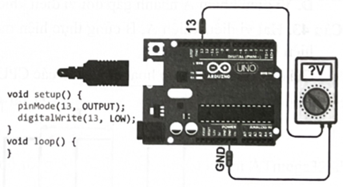
A. 0 V.
B. 3,3 V.
C. 5 V.
D. 9 V.
Khi cho Arduino chạy chương trình A vẽ được giản đồ xung tại chân kĩ thuật số 13 của Arduino như hình bên dưới.
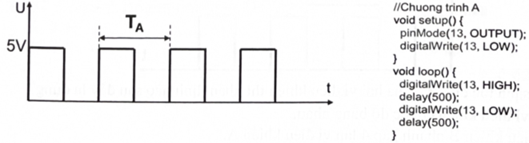
Tần số của xung tuần hoàn được tạo ra trên chân 13 là
A. 0 Hz.
B. 1 Hz.
C. 5 Hz.
D. 100 Hz.
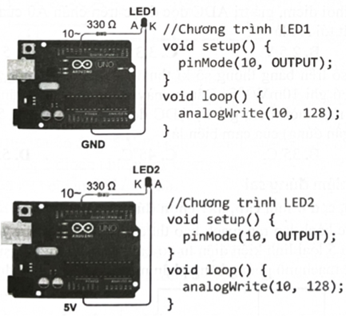
Cho cả hai Arduino với mạch điện lắp đặt tương ứng cùng chạy chương trình PWM như hình dưới đây.
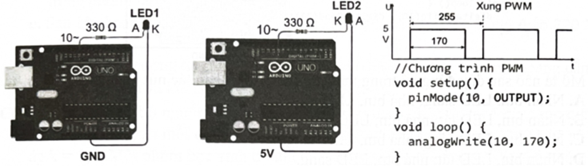
Với cùng loại đèn LED và hai bo mạch lập trình Arduino là như nhau. Nhận xét nào sau đây về độ sáng của hai đèn LED khi chạy chương trình PWM trên là đúng?
A. LED1 sáng hơn LED2.
B. LED1 sáng bằng LED2.
C. LED1 không sáng bằng LED2.
D. LED1 sáng, LED2 không sáng.
Cho hai bo mạch Arduino với mạch điện lắp đặt và chương trình tương ứng dưới đây.
Với cùng loại đèn LED và hai bo mạch lập trình Arduino là như nhau. Nhận xét nào sau đây đúng về độ sáng của hai đèn LED khi chạy chương trình như trên?
A. LED1 sáng hơn LED2.
B. LED1 sáng bằng LED2.
C. LED1 không sáng bằng LED2.
D. LED1 sáng, LED2 không sáng.
Bộ chuyển đổi tương tự – số ADC trên bo mạch lập trình Arduino UNO có độ phân giải 10-bit, điện áp tham chiếu VRF = 5 V. Giá trị ADC lớn nhất mà bộ chuyển đổi này đạt được là bao nhiêu?
A. 128.
B. 512.
C. 1023.
D. 2048.
Khi cho Arduino chạy đoạn chương trình A như dưới đây.
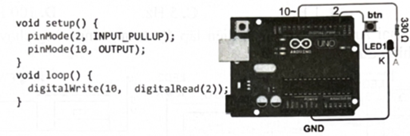
Mô tả nào sau đây đúng về trạng thái của LED1 khi thao tác nút nhấn?
A. Nhấn btn, LED sáng; nhả btn, LED tắt.
B. Nhấn btn, LED tắt; nhả btn, LED tắt.
C. Nhấn btn, LED sáng; nhả btn, LED sáng.
D. Nhấn btn, LED tắt; nhả btn, LED sáng.
Nếu tại một thời điểm, giá trị ADC đọc được trên chân A0 của Arduino UNO là 1023 thì điện áp đặt tới A0 là
A. 0 V.
B. 3,3 V.
C. 5 V.
D. 9 V.
Nếu tại một thời điểm, giá trị ADC đọc được trên chân A0 của Arduino UNO là 512 thì điện áp đặt tới AO là
A. 0 V.
B. 2,5 V.
C. 3,3 V.
D. 5 V.
Nếu tại một thời điểm, giá trị ADC đọc được trên chân A0 của Arduino UNO là 675 thì điện áp đặt tới AO là
A. 0 V.
B. 2,5 V.
C. 3,3 V.
D. 5 V.
Theo thông số trên bảng thông số kĩ thuật (DataSheet), một cảm biến nhiệt độ đầu ra tương tự có ghi 10mV/1°C. Đầu ra này được đưa tới chân A1 của bo mạch Arduino, nếu tại một thời điểm giá trị ADC đọc được tại A1 là 51 thì nhiệt độ đo được (lấy giá trị gần đúng) của cảm biến là
A. 25°C.
B. 35°C.
C. 45°C.
D. 55°C.