306 câu trắc nghiệm Kỹ thuật cảm biến có đáp án (Phần 1
25 câu hỏi
Cảm biến là thiết bị dùng để biến đổi các đại lượng nào sau đây:
Đại lượng vật lý
Đại lượng điện
Đại lượng dòng điện
Đại lượng điện áp
Cảm biến là thiết bị dùng để biến đổi các đại lượng nào?
Đại lượng không điện
Đại lượng điện
Đại lượng dòng điện
Đại lượng điện áp
Cảm biến là kỹ thuật chuyển các đại lượng vật lý thành:
Đại lượng không điện
Đại lượng điện
Đại lượng áp suất
Đại lượng tốc độ
Đại lượng (m) là đại lượng cần đo của cảm biến được biểu diễn bởi hàm s=F(m) thì:
(m) là đại đầu ra
(m) là đầu vào
(m) là phản ứng của cảm biến
(m) là đại điện
Một cảm biến được gọi là tuyến tính trong một dải đo xác định nếu:
Trong dải chế độ đó có độ nhạy không phụ thuộc vào đại lượng đo
Trong dải chế độ đó có sai số không phụ thuộc vào đại lượng đo ụ thuộc vào đại lượng đo
Trong dải chế độ đó có độ nhạy phụ thuộc vào đại lượng đo
Trong dải chế độ đó có sai số ph
Phương trình biểu diễn đường thẳng tốt nhất được lập bằng phương pháp nào?
Phương pháp tuyến tính
Phương pháp phi tuyến
Phương pháp bình phương tối thiểu
Phương pháp bình phương lớn nhất
Đường cong chuẩn của cảm biến là:
Đường cong biểu diễn sự phụ thuộc của đại lượng điện (s) ở đầu ra của cảm biến vào giá trị của đại lượng đo (m) ở đầu vào
Đường cong biểu diễn sai số của đại lượng điện (s) ở đầu ra của cảm biến và giá trị của đại lượng đo (m) ở đầu vào
Đường cong biểu diễn sự phụ thuộc của đại lượng không mang điện (s) ở đầu ra của cảm biến vào giá trị của đại lượng đo (m) ở đầu vào
Đường cong biểu diễn sự phụ thuộc của đại lượng không kích thích (s) ở đầu ra của cảm biến vào giá trị của đại lượng phản ứng (m) ở đầu vào
Đường cong chuẩn có thể biểu diễn:
Bảng liệt kê
Biểu thức đại số và đồ thị
Độ nhạy
Sai số
Mục đích của chuẩn cảm biến là:
Xác định tín hiệu đầu ra cảm biến thuộc loại nào
Xác lập mối quan hệ giữa đại lượng điện ở đầu ra và đại lượng đo, trên cơ sở đó xây dựng đường cong chuẩn
Xác định sai lệch trong quá trình đo của cảm biến
Tìm đặc tính vật lý của cảm biến
Xác định phát biểu đúng cho các loại sai số khi sử dụng cảm biến:
Sai số hệ thống không khắc phục được, còn sai số ngẫu nhiên thì có thể khắc phục
Sai số hệ thống có thể khắc phục được, còn sai số ngẫu nhiên thì không
Cả sai số hệ thống và sai số ngẫu nhiên đều có thể khắc phục
Cả sai số hệ thống và sai số ngẫu nhiên đều không thể khắc phục
Cảm biến nhiệt được chế tạo dựa trên nguyên lý nào sau đây:
Hiệu ứng nhiệt điện
Hiệu ứng hỏa nhiệt
Hiệu ứng áp điện
Hiệu ứng áp điện
Cảm biến đo tốc độ chuyển động quay có thể được chế tạo dựa trên nguyên lý nào sau đây:
Hiệu ứng quang điện
Hiệu ứng quang-điện từ
Hiệu ứng áp điện
Hiệu ứng cảm ứng điện từ
Hiệu ứng Hall được ứng dụng để thiết kế loại cảm biến nào sau đây:
Cảm biến đo từ thông
Cảm biến đo bức xạ ánh sáng
Cảm biến đo dòng điện
Cảm biến đo tốc độ
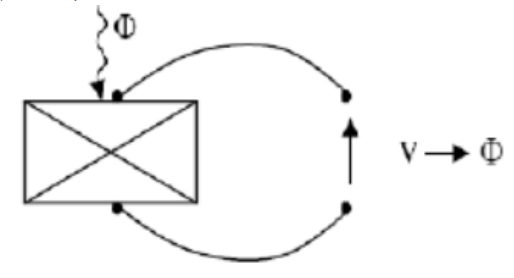
Hình vẽ sau mô tả cho nguyên lý chế tạo của cảm biến nào?
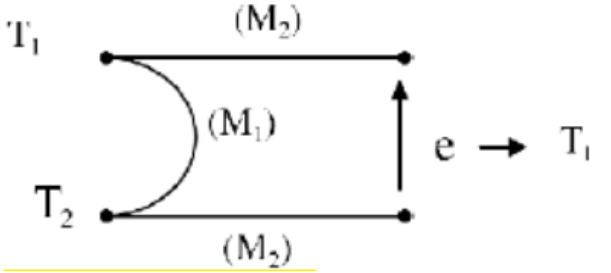
Hiệu ứng nhiêt điện
Hiệu ứng hoả nhiệt
Hiệu ứng áp điện
Hiệu ứng cảm ứng điện từ
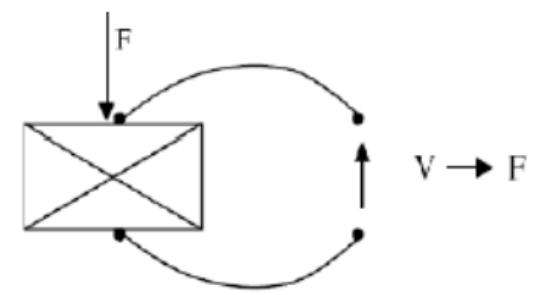
Hình vẽ sau mô tả cho nguyên lý chế tạo của cảm biến nào:
Hiệu ứng nhiêt điện
Hiệu ứng hoả nhiệt
Hiệu ứng áp điện
Hiệu ứng cảm ứng điện từ
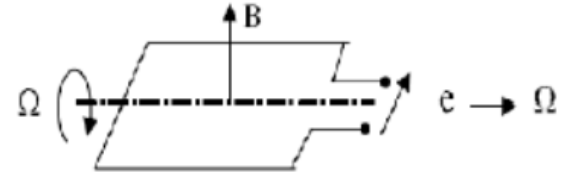
Hình vẽ sau mô tả cho nguyên lý chế tạo của cảm biến nào:
Hiệu ứng nhiêt điện
Hiệu ứng hoả nhiệt
Hiệu ứng áp điện
Hiệu ứng cảm ứng điện từ
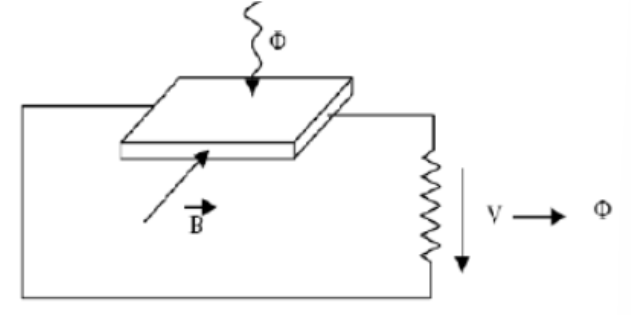
Hình vẽ sau mô tả cho nguyên lý chế tạo của cảm biến nào:
Hiệu ứng nhiêt điện
Hiệu ứng hoả nhiệt
Hiệu ứng áp điện
Hiệu ứng cảm ứng điện từ
Hình vẽ sau mô tả cho nguyên lý chế tạo của cảm biến nào:
Hiệu ứng nhiêt điện
Hiệu ứng hoả nhiệt
Hiệu ứng quang – điện – từ
Hiệu ứng Hall
Hình vẽ sau mô tả cho nguyên lý chế tạo của cảm biến nào:
Hiệu ứng nhiêt điện
Hiệu ứng hoả nhiệt
Hiệu ứng quang – điện – từ
Hiệu ứng Hall
Từ hình vẽ đáp ứng của cảm biến sau hãy cho biết (tdm) gọi là gì?
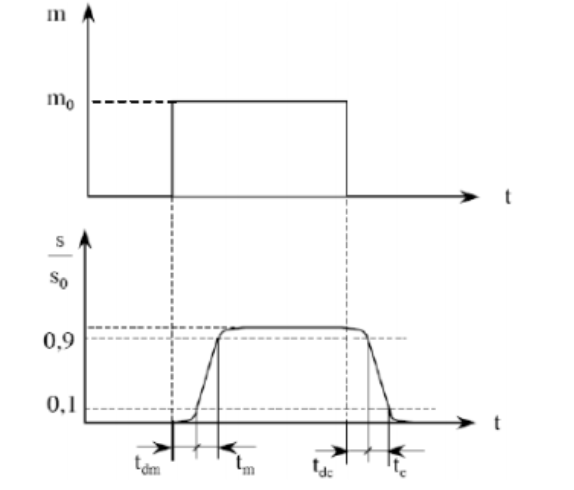
Thời gian trễ khi tăng
Thời gian trễ khi giảm
Thời gian tăng
Thời gian giảm
Từ hình vẽ đáp ứng của cảm biến sau hãy cho biết (tdc) gọi là gì?
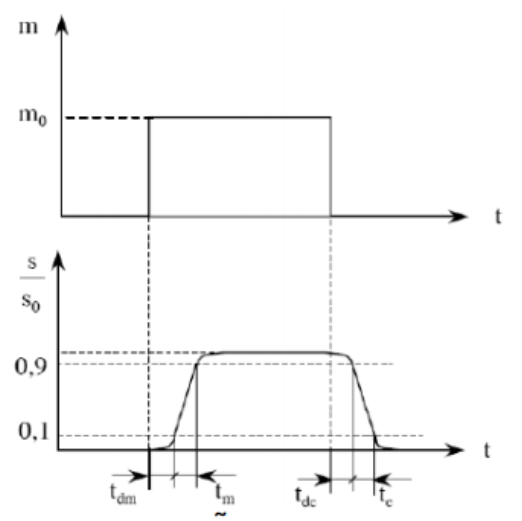
Thời gian trễ khi tăng
Thời gian trễ khi giảm
Thời gian tăng
Thời gian giảm
Từ hình vẽ đáp ứng của cảm biến sau hãy cho biết (tm) gọi là gì?
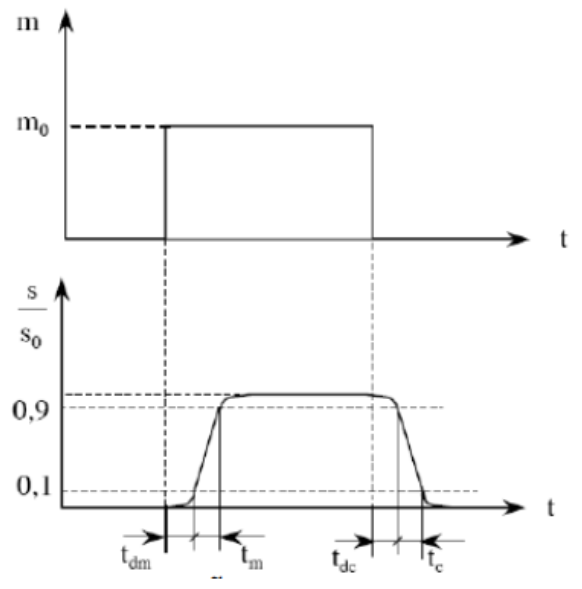
Thời gian trễ khi tăng
Thời gian trễ khi giảm
Thời gian tăng
Thời gian giảm
Cảm biến tích cực là cảm biến có đáp ứng là:
Điện tích
Điện trở
Độ tự cảm
Điện dung
Vùng làm việc danh định của cảm biến là:
Là vùng làm việc danh định tương ứng với những điều kiện sử dụng bình thường của cảm biến
Là vùng mà các đại lượng ảnh hưởng còn nằm trong phạm vi không gây nên hư hỏng
Là vùng mà các đại lượng ảnh hưởng vượt qua ngưỡng của vùng không gây nên hư hỏng nhưng vẫn còn nằm trong phạm vi không bị phá hủy
Là vùng mà cảm biến phải tiến hành chuẩn lại cảm biến
Vùng không gây nên hư hỏng:
Là vùng làm việc định danh tương ứng với những điều kiện sử dụng bình thường của cảm biến
Là vùng mà các đại lượng ảnh hưởng còn nằm trong phạm vi không gây nên hư hỏng
Là vùng mà các đại lượng ảnh hưởng vượt qua ngưỡng của vùng không gây nên hư hỏng nhưng vẫn còn nằm trong phạm vi không bị phá hủy
Là vùng mà cảm biến phải tiến hành chuẩn lại cảm biến