
25 CÂU HỎI
Cho hàm truyền , hãy lập phương trình trạng thái
A.
B.
C.
D.
Cho hàm truyền, hãy lập phương trình trạng thái
A.
B.
C.
D.
Cho hàm truyền ,hãy lập phương trình trạng thái
A.
B.
C.
D.
Cho hàm truyền ,hãy lập phương trình trạng thái
A.
B.
C.
D.
Cho hàm truyền ,hãy lập phương trình trạng thái
A.
B.
C.
D.
Cho hàm truyền ,hãy lập phương trình trạng thái
A.
B.
C.
D.
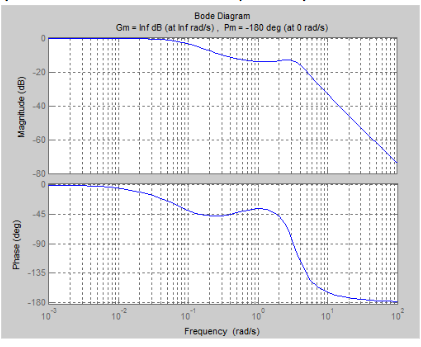
Khảo sát tính ổn định của hệ kín biết hệ hở có biểu đồ Bode như hình trên:
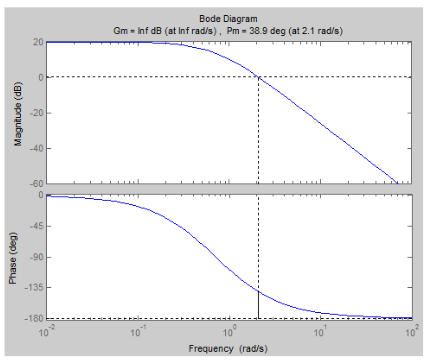
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
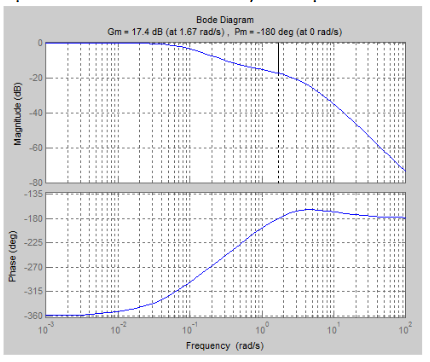
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
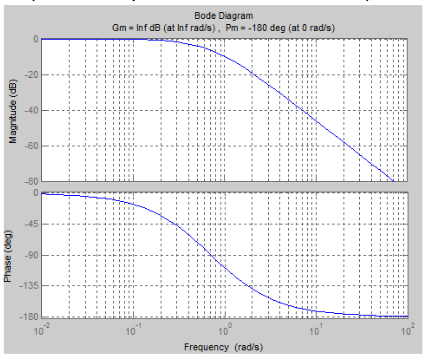
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
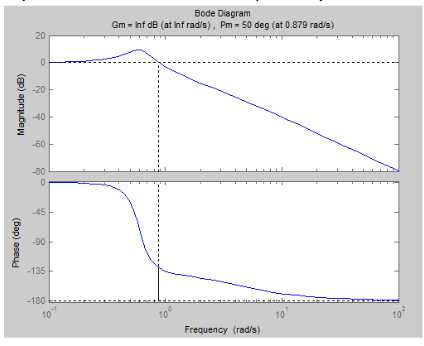
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
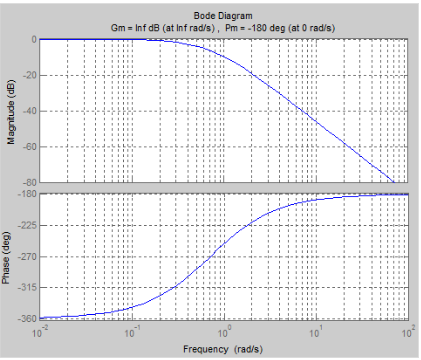
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
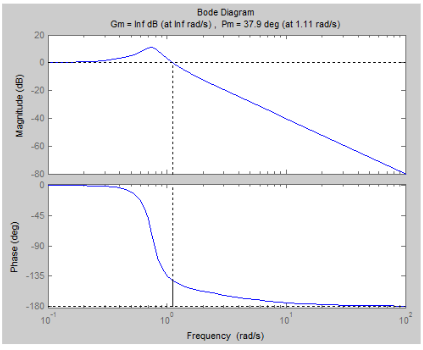
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
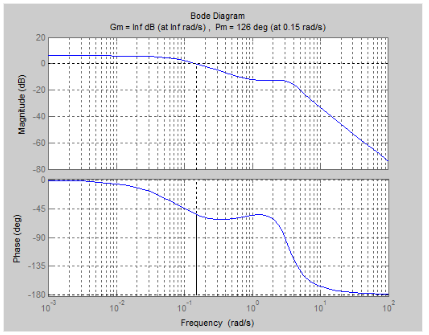
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
Bài toán cơ bản trong lĩnh vực điều khiển:
A. Phân tích hệ thống, thiết kế hệ thống
B. Thiết kế hệ thống
C. Phân tích hệ thống, thiết kế hệ thống, nhận dạng hệ thống
D. Thiết kế hệ thống, nhận dạng hệ thống
Cho sơ đồ khối hệ thống điều khiển như hình vẽ, tín hiệu ngõ ra là:
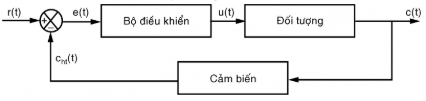
A. u(t)
B. c(t)
C. r(t)
D. e(t)
Cho sơ đồ khối hệ thống điều khiển như hình vẽ, tín hiệu sai số là:
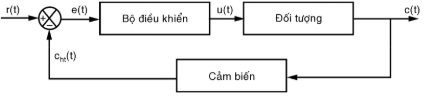
A. u(t)
B. c(t)
C. r(t)
D. e(t)
Cho sơ đồ khối hệ thống điều khiển như hình vẽ, các phát biểu sau, phát biểu nào đúng:
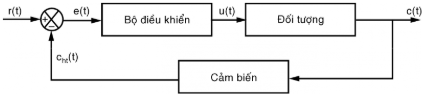
A. Hệ thống trên là hệ thống điều khiển tuyến tính
B. Hệ thống trên là hệ thống điều khiển vòng hở
C. Hệ thống trên là hệ thống điều khiển hồi tiếp
D. Hệ thống trên là hệ thống điều khiển số
Khối mạch đo trong hệ thống điều khiển vòng kín có nhiệm vụ:
A. Đo tín hiệu điện ở ngõ ra của hệ thống
B. Đo tín hiệu điều khiển
C. Đo và hiển thị ngõ ra
D. Đo đáp ứng ngõ ra của hệ thống để cung cấp cho bộ điều khiển
Một hệ thống điều khiển tự động gồm những thành phần cơ bản nào?
A. Đối tượng điều khiển, thiết bị điều khiển và thiết bị đo lường
B. Thiết bị điều khiển, thiết bị đo lường
C. Đối tượng điều khiển, thiết bị điều khiển
D. Đối tượng điều khiển, thiết bị đo lường
Đa thức đặc trưng của hệ thống là:
A. Mối liên hệ giữa tín hiệu ra và tín hiệu vào của hệ thống
B. Là mẫu số của hàm truyền đạt của đối tượng điều khiển
C. Đa thức mẫu số của hàm truyền đạt
D. Đa thức tử số của hàm truyền đạt
Nghiệm đa thức mẫu số của PTĐT được gọi là?
A. Các điểm uốn
B. Các điểm cực
C. Các điểm cực trị
D. Các điểm không
Ở trạng thái xác lập, sai lệch tĩnh là:
A. Sai lệch giữa tín hiệu đặt và tín hiệu điều khiển
B. Sai lệch giữa tín hiệu đo và tín hiệu đặt
C. Sai lệch giữa tín hiệu đo và tín hiệu điều khiển
D. Sai lệch giữa tín hiệu đặt và tín hiệu đo
Kỹ thuật điều khiển tự động có thể được ứng dụng trong lĩnh vực kỹ thuật nào?
A. Cơ khí và hàng không
B. Điện và y sinh
C. Hóa học và môi trường
D. Tất cả các câu trên đều đúng
Gợi ý cho bạn
Bài Quiz không có tiêu đề