
20 câu hỏi
Cho phép tính như như hình dưới với A= 4, B=3, C=5, D=8. KQ2 có giá trị là?
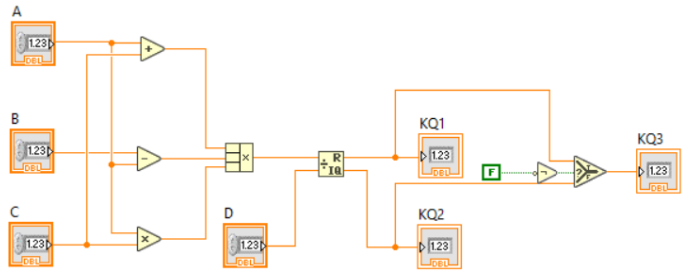
14
-23
46
Đáp án khác
Cho phép tính như như hình dưới với A= 4, B=3, C=5, D=8. KQ3 có giá trị là?
61
2
46
Đáp án khác
Sau khi chạy xong chương trình, KQ có giá trị là:
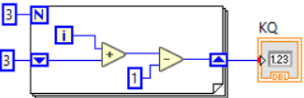
9
4
1
Đáp án khác
Cho đoạn lệnh như hình dưới trạng thái ban đầu của led là tắt. Số lần LED thay đổi trạng thái là:
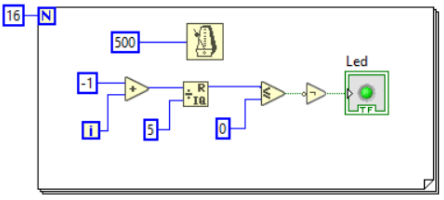
3
4
5
Đáp án khác
Cho đoạn lệnh như hình dưới trạng thái ban đầu của led là tắt. Chu kỳ của vòng lặp là?
1000 [ms]
2 [s]
0.5 [s]
Đáp án khác
USB 2.0 có tốc độ truyền bằng bao nhiêu lần so với USB 3.0, chọn đáp án đúng nhất:
2
0.1
10
20
Đâu là công thức PID đúng:
\(u = {K_p}e + {K_i}\int\limits_0^t {edt + {K_d}\frac{{de}}{{dt}}} \)
\(u = {K_p}(e + \frac{1}{{{T_i}}}\int\limits_0^t {edt + {T_d}\frac{{de}}{{dt}}} )\)
Cả công thức trên 2 đều đúng
Đáp án khác.
Kiểu dữ liệu nào được sử dụng để đọc và ghi dữ liệu trong các hàm VISA:
String
Boolean
Array
Numeric
Kiểu dữ liệu Boolean Array có màu gì:
Cam
Hồng
Xanh lá
Đáp án khác
Chọn phát biểu đúng cho hàm sau:
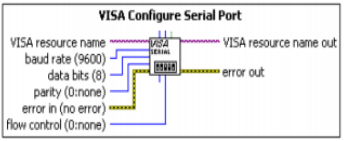
Chân VISA resource name để chọn tốc độ truyền
Baud rate có thể thay đổi.
Khi sử dụng hàm có thể bỏ trống chân VISA
Chân VISA resource name out là tên của thiết bị.
Chọn phát biểu sai khi phát biểu về giải thuật PID khi viết trong hàm Formula node:
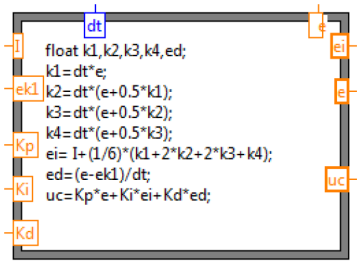
uc là tín hiệu ngõ vào của bộ PID
Có thể lập trình giải thuật PID trên vi xử lý dựa vào đoạn code trong formula này
ei được tính dựa vào phương pháp RK bậc 4.
e là sai số thu được từ giá trị đặt trừ đi giá trị hồi tiếp.
Phát biểu nào sau đây sai khi nói về bộ điều khiển PID dùng trên Labview:
Labview thu thập tín hiệu cảm biến hồi tiếp về thông qua các cổng USB, COM, PCI,…
Quá trình điều khiển được thực hiện đều đặn với chu kỳ Ts.
Bộ điều khiển PID trên Labview có thể điều khiển được các đối tượng động cơ, thanh gia nhiệt.
Tất cả các đáp án trên đều sai
Mối liên hệ giữa Ki và Ti là:
\({T_i} = \frac{1}{{{K_p}{K_i}}}\)
\({T_i} = {K_i}{K_p}\)
\({T_i} = \frac{{{K_p}}}{{{K_i}}}\)
Đáp án khác
Cho sơ đồ điều khiển vòng kín một đối tượng công thức PID dạng Parallel như hình vẽ sau, với bộ điều khiển sử dụng giải thuật PID. Chọn phát biểu đúng:
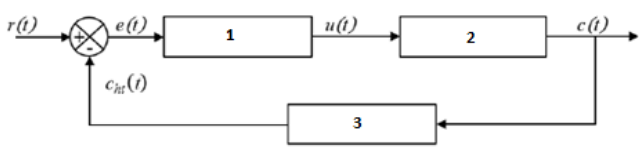
Các khối 1,2 và 3 lần lượt là: cảm biến, bộ điều khiển, đối tượng điều khiển.
c(t) là tín hiệu đầu ra để điều khiển đối tượng.
c(t) là tín hiệu hồi tiếp trực tiếp về hệ thống để tín toán sai số.
Tất cả đáp án trên đều sai.
Cho sơ đồ điều khiển vòng kín một đối tượng công thức PID dạng Parallel như hình vẽ sau, với bộ điều khiển sử dụng giải thuật PID. Chọn phát biểu đúng:
Các khối 1,2 và 3 lần lượt là: Cảm biến, đối tượng điều khiển, bộ điều khiển.
e(t) là sai số.
u(t) là tín hiệu ngõ ra của cảm biến
Tất cả các đáp án trên đều sai.
Cho sơ đồ điều khiển vòng kín một đối tượng công thức PID dạng Parallel như hình vẽ sau, với bộ điều khiển sử dụng giải thuật PID. Đáp ứng có thời gian lên và thời gian xác lập lớn để cải thiện chất lượng đáp ứng chọn phát biểu đúng nhất:
Giảm Kp hoặc giảm Ki hoặc tăng Kd
Giảm Kp hoặc tăng Ki hoặc tăng Kd
Tăng Kp hoặc tăng Ki hoặc tăng Kd
Tăng Kp hoặc tăng Ki hoặc giảm Kd
Cho sơ đồ điều khiển vòng kín một đối tượng công thức PID dạng Parallel như hình vẽ sau, với bộ điều khiển sử dụng giải thuật PID. Thông số Kd có ảnh hưởng như thế nào đến hệ thống, chọn phát biểu đúng:
Tăng Kd làm tăng độ vọt lố
Tăng Kd làm giảm độ vọt lố
Tăng Kd làm tăng mạnh thời gian lên
Tất cả các đáp án trên đều sai.
Cho sơ đồ điều khiển vòng kín một đối tượng công thức PID dạng Parallel như hình vẽ sau, với bộ điều khiển sử dụng giải thuật PID. Thông số Kp có ảnh hưởng như thế nào đến hệ thống, chọn phát biểu đúng:
Giảm Kp làm giảm thời gian lên
Tăng Kp làm tăng thời gian lên
Tăng Kp làm triệt tiêu sai số xác lập
Tất cả các đáp án trên đều sai
Cho sơ đồ điều khiển vòng kín một đối tượng công thức PID dạng Parallel như hình vẽ sau, với bộ điều khiển sử dụng giải thuật PID. Thông số Ki có ảnh hưởng như thế nào đến hệ thống, chọn phát biểu đúng:
Tăng Ki làm triệt tiêu sai số xác lập
Tăng Ki làm giảm bớt sai số xác lập nhưng không thể triệt tiêu
Giảm Ki làm giảm thời gian lên
Tất cả các đáp án trên đều sai
Cho sơ đồ điều khiển vòng kín một đối tượng công thức PID dạng Parallel như hình vẽ sau, với bộ điều khiển sử dụng giải thuật PID. Hệ thống có Exl lớn làm thế nào để giảm nhỏ Exl, chọn đáp án đúng nhất:
Tăng Kp
Tăng Kp hoặc tăng Ki
Giảm Kp Hoặc giảm Kd
Giảm Kp Hoặc tăng Ki